
Challenge
Click here for Social Robotics Challenge 2019 finalists
Social Robotics Challenge 2019
The challenge this year is to build a social robot that can perform social interaction with a human (play a game, communicate social or emotional information, behave like a human, etc.). In order for the robotic system to exhibit human attributes, the competition involves developing interaction mechanism that provokes perceiving the robot as a human. Examples is when the robot cheats, human players would typically associate human attributes to the robot. Teams may think about other way to provoke such a perception. The robotic system will also be evaluated based on technical performance (response time, robustness, dexterity, etc.).
Technically, the robotic hand system is shown in Figure 1. The hand is part of an Open Source 3D printed life-size robot designed by Gael Langevin at http://inmoov.fr/. Inmoov robotic hand started as an open source project on 2012 for the development of an open source prosthetic hand. Inmoov project has been developed further since 2012 and today is aiming to be the first open source 3D printed life size robot. Inmoov robotic hand is replicable to any 3D printer with volume of 12x12x12 cm³ or bigger and it is considered as an ideal development platform for Universities, Laboratories, and even hobbyists. More information about the hand (including a full humanoid) can be found here: http://inmoov.fr/
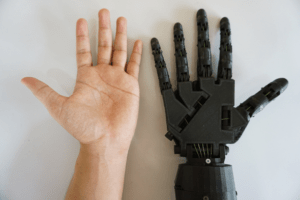 Figure 1: Robotic hand available for the challenge.
Figure 1: Robotic hand available for the challenge.
The hand comprises five fingers driven by servo motors, which in turn are controlled through a microcontroller. A software running on a laptop (or desktop) controls the servomotors of the robotic hand to produce the respective hand gesture. Meanwhile a motion tracking sensor is also available in case the task involves tracking the hands of the human. Hand tracking devices, such as the Leap Motion (https://www.leapmotion.com/) or Microsoft Kinect camera (https://msdn.microsoft.com/en-us/library/hh438998.aspx), will be used to support such capabilities.
Important Dates:
- Challenge announced: September 12, 2018
- Proposal submission deadline: October 15, 2018
- Final project submission (Video demonstration): January 15, 2019
- Competition day: February 4th, 2019.
What you need to form a team?
Two or more undergraduate and/or graduate students from a university or college recognized in United Arab Emirates, with one or more mentors to ‘coach’ them through the build of the project.
When the competition takes place?
The competition takes place during the Joint UAE Symposium on Social Robotics (JSSR). This year, the competition will be hosted at NYU Abu Dhabi campus on the 4th of February 2019.
What is the time commitment?
As a mentor, you should meet with your team regularly (at least once a week) during the build of the project. You do not have to attend the competition day, but you are encouraged to attend and support your team.
As a team member, you should meet with your team more often (2-3 times a week). At least one team member has to attend the competition in order to present on behalf of the group.
Skills required?
Some programming skills, basic electronics, basic skills in control and robotics, basic skills in social sciences.
Organizers Support
The organizers of the challenge will provide teams with winning proposals the 3D printed design, as well as the electronics needed to bring the hand to life (servo motors, controller, etc.). The competing teams will have to assemble the arm and build their proposed social experience on top.
Project Proposal
Students from universities (graduate and/or undergraduate) are invited to submit a single PDF document no more than 3 pages (approximately 1,600 words) by October 15 2018 12:00pm noon. Please submit your application via email to the following email address: mohamad.eid@nyu.edu and fady.alnajjar@uaeu.ac.ae.
- Title, team members, mentor(s), and affiliation
- Abstract
- Summary of the proposal
- A time line for the project
- Any additional resources the team may need to pursue the project
Competition Finalists
- Shadow Teacher (UAEU)
Ameera Saeed
Aysha Al Sawafi
Eiman Al Shamsi
Fatima Al Ketbi
Sara Al Saedi - Intelligence Fellow (IF) Robot (UAEU)
Amna Mohammed Alnaaimi
Hassan Umari
Hamda Rashed Abdulla Alnuaimi
Reem Saleh Essa Alsaffar - WeFxBO (NYUAD)
Grace Gu
Uljad Berdica
Panos Oikonomou - Gobi (NYUAD)
Hazem Lashen - Friend or Foe? (NYUAD)
Elena Negoiu
Ingie Baho