Step 1: Build the circuit
This is the first time I used the H-bridge to build the circuit. I found it complicated but not that difficult. Even though there were many pins, following the pin number to connect the circuit to the breadboard and Arduino did save a lot of time and cause less error. I felt a sense of achievement after finishing the circuit.
Step 2: Control rotation with a potentiometer
This is the step I spent most of the time on. First of all, I misunderstood the instructions and removed all the circuits. Therefore, stupid me needs to rebuild the circuit again. However, I later found out that I can not find the correct port I want. The learning assistant told me that maybe it was the Arduino issue, so I rushed to the equipment room to borrow another Arduino board. The problem still lasted. Next, I tried to replace circuits, potentiometer, resistor, adaptor one after another, and finally, I get the conclusion that it was the USB protector issue.
I also learned that a USB protector may make the code upload slower.
( On the 3/15 lecture, I found out that not only the USB protector but also Arduino is broken. No wonder that day I debugged for such a long time and asked many LAs, fellows, and professor for help.)
Step 3: Build a Drawing Machine!
After class, I finally finished my step 2 circuit and worked with Steven to build a drawing machine. Even though we could not draw something accurate or marvelous, I was still proud of my achievement.
Question 1: What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I am interested in building a machine that combines a bladeless fan and perfume atomizer. In this case, fragrance can spread to the whole space, avoiding only the air beside the atomizer is good-smelling. The users can also feel surprising because normal fans can not emit different flavor gas. After searching for the technology for these two machines, I think I need to make the base bigger. One side is for the ultrasonic oscillator to resonate atomizing head and break down the liquid into mist, the other side is for the compressor to draw in the air. The final process is to combine the air and perfume mist and directed upwards to emerge from a slit around the ring. I think this machine is very interesting that can be used in not only at home but also in restaurants, malls and so on.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
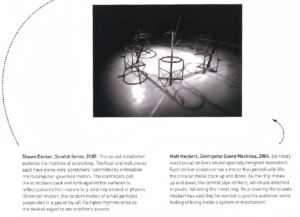
“Centripetal Sound Machine” by Matt Heckert used the motor to affect every striker sculpture and make it rotate on a regular basis and make sounds. I think it is similar to this recitation because we also learned how to control the motor to rotate. However, Heckert made the machine work itself, unlike we need to connect it to the computer to control it. It is not like an interaction device but an exhibition art. In my opinion, it is smart to control the circular metal track up and down to make sounds, for not only make metal sounds but also met the requirement of “feeling of being inside a system or machnism”.
/*
MotorKnob
A stepper motor follows the turns of a potentiometer
(or other sensor) on analog input 0.
http://www.arduino.cc/en/Reference/Stepper
This example code is in the public domain.
*/
#include <Stepper.h>
// change this to the number of steps on your motor
#define STEPS 200
// create an instance of the stepper class, specifying
// the number of steps of the motor and the pins it's
// attached to
Stepper stepper(STEPS, 8, 9, 10, 11);
// the previous reading from the analog input
int previous = 0;
void setup() {
// set the speed of the motor to 30 RPMs
stepper.setSpeed(30);
Serial.begin(9600);
}
void loop() {
// get the sensor value
int val = analogRead(A0);
Serial.println(val);
int steps = map(val, 0, 1023, 0, 200);
// move a number of steps equal to the change in the
// sensor reading
stepper.step(steps - previous);
// remember the previous value of the sensor
previous = steps;
}
Leave a Reply