In the beginning of this recitation me and my partner (Dana) briefly went through the tasks and then divided responsibilities: I was in charge of the cardboard work, while Dana was following the instructions and connecting the wires.
- Cardboard struggles (none)
As I spent past two weeks with a glue gun in hand for another class, the gluing and folding part were quite easy for me. I found the paper cutouts a very useful and great idea! It took me approximately 20 minutes to assemble.
- Wiring struggles
Dana has followed the instructions precisely, and got that as she forgot to connect it to the higher power:
After I reminded her of that, we were basically done with the base.
Then, when we put the motor into the construction, we realized that due to the movement it kept falling out, so we added this cardboard “fence” to prevent that:
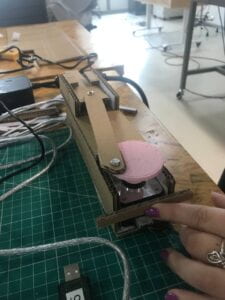
and moved forward to personalizing the construction.
- personalization: idea
from the very moment we have assembled the construction we had an idea of making it look like a frog that moves her tongue to catch a fly (doing that at the same speed but random intervals). so we decided to make the tongue look like an actual tongue by painting it read in some places + adding two eyes and add some green details as well.
- code
as for the code, i have already mentioned the random() delay idea. we also personalized the steps per revolution. //you can find the code in the end of the post//
the final result:
Question 1: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project. This is the project I have chosen called Feral Robot Dogs by Natalie Jeremijenko. This use of actuators is similar to what we did they are used to mimic animal part’s movement. Our was the tongue, here is the movement of a dog. Also this project is quite interesting as it has an element of environmental activism to it, which is always great! I am curious how the sensors work though, do they somehow detect the clarity of the air? fascinating.
This is the project I have chosen called Feral Robot Dogs by Natalie Jeremijenko. This use of actuators is similar to what we did they are used to mimic animal part’s movement. Our was the tongue, here is the movement of a dog. Also this project is quite interesting as it has an element of environmental activism to it, which is always great! I am curious how the sensors work though, do they somehow detect the clarity of the air? fascinating.
Question 2: What kind of mechanism would you be interested in building for your midterm project? Explain your idea using a sketch (conceptual or technical) with a list of materials that you plan to use. Include details about the ways that you expect the user to embrace in a physical interaction with your project. In particular, explain how would your motor (or motors) with a mechanism will be different than using an animation on a digital screen.
this is my midterm proposal:
The mechanism that I am planning to build for the midterm does not really involve motors. We might use it to display how our puzzle work. Me and my partner are going to experiment with how we can make the interaction a bit more interesting and complex (from technical side).
*
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include <Stepper.h>
const int spr = 400; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(spr, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(56);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(spr);
delay(random(200-400));
/*
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
*/
}