In the class, I paired up with Sid, and I think the project of this recitation is quite interesting. Basically, there were two parts, the first was about the mechanism; the second one was about the circuit. It was a mechanism that will automatically move up and down.
I’m better at making cardboard and the mechanism part, so I was cutting the cardboard and making the mechanism. Sid volunteered to build the wiring.
- The cardboard mechanism
.

I first attached the paper to the cardboard and followed the instruction picture to cut the pieces off. And I had a look of the example and then it was very smooth to put the different parts of the cardboard together. One thing I almost messed up was that the piece of cardboard that was attached to the motor cannot be glued, it needed to be movable.

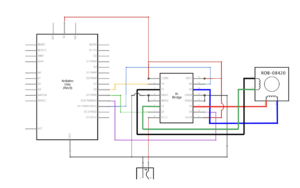
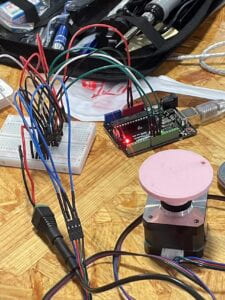
- The circuit
We read the recitation instructions before the recitation class and made an effort to comprehend how the various parts interacted. He started constructing the circuit in accordance with the instructions after we had all the necessary materials and parts ready. Sid placed the chip in the middle of the breadboard after connecting the 5V and GND. After that, He connected the stepper motor to the chip using male-to-male jumper cables. To prevent misconnection, he utilized jumper wires that were the same color as the stepper motor’s cables. He then connected each 5V and GND independently using red and black cables. Last but not least, he used pinMode cables in green and blue. We checked the sample code after that, then Sid uploaded it to the Arduino. Everything was nice and the code worked well. The code and testing video are provided below.
#include <Stepper.h>
const int stepsPerRevolution = 200;
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
myStepper.setSpeed(randomSpeed);
Serial.begin(9600);
}
void loop() {
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(1000);
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(1000);
}

So the whole circuit had done, and it was successfully connected to the motor and the cardboard mechanism. It worked pretty well, and the only last step was to design a personalized top.
- Personalize it
After assembling the template’s components, we had a quick discussion and decided to create a puppy which was my WeChat profile. I like drawing stuff, so basically, I designed how the puppy looked and drew a sketch on the cardboard. And I cut the puppy out of the cardboard, which took me a while. Because it was really hard to cut things on the cardboard. But, after finishing it, we were quite surprised. It was so cute, and we attached it to the mechanism. It worked pretty smoothly!

And when professor Rudi saw our project, he suggested that we could make a box or something else to create a tiny story. Like the puppy can pop up out of the box to welcome you. It can be a device at the entrance, this puppy can pop out of the box to welcome the owner home, which would be very cute.
Question 1: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
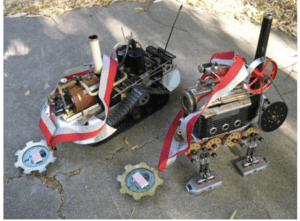
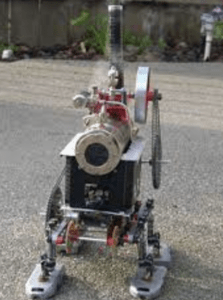
I really like this project because it also has a clever use of motor. We all use particular parts to transmit power, which is a similarity between our project and the work we’ve done on the recitation. I really like the complex transmission motor system. The creator, in my opinion, chose the steam machine to supply the power not only because he or she loves steam engines, but also because the machine can generate powerful power and convey it effectively to the robot’s feet. I really appreciate this design.
Question 2: What kind of mechanism would you be interested in building for your midterm project? Explain your idea using a sketch (conceptual or technical) with a list of materials that you plan to use. Include details about the ways that you expect the user to embrace in a physical interaction with your project. In particular, explain how would your motor (or motors) with a mechanism will be different than using an animation on a digital screen.
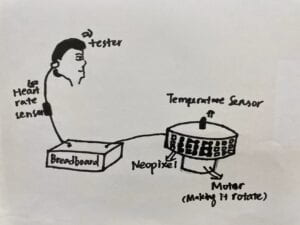
For my midterm, I want to combine a rotating motor and a temperature sensor. I want to wrap this Neopixel screen around a cylinder made of cardboard, and when our hand is near the temperature sensor, this cylinder will rotate under the action of the motor. I want to use Neopixel’s screen to show the heartbeat sensor expression, and this motor will be linked to the temperature sensor. I think it will be more direct and intuitive than a 2D animation.