Experiment Description
This lab we observed the biological rhythm of regular drosophila and drosophila with genetical mutation. We separated female drosophila for more accuracy. Then each group put the mutational drosophila in 8 tubes and the regular ones in another 8 as comparison. We sealed the tubes and put them in a monitor to observe whether they would fly across the middle of the tube for a day.



Analyzation on Experiment Result
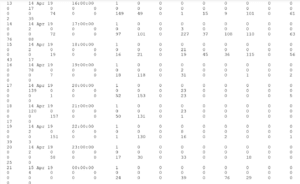
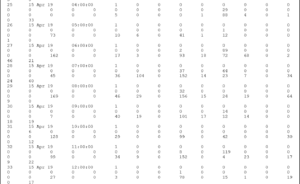
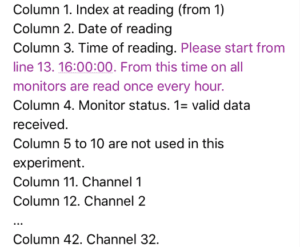
A part of the result table is shown below:
Explanation of the Result Table
(from Rudi)
From the result we can see a clear periodical behavior for normal drosophila: they move in the day and rest at night. The genetically modified ones shows some lack of biological clock, although not completely. Some were active during the night and quiet during the day.
It shows the cry gene affects the biological rhythm of drosophila. There are also some drosophila that hardly moves in both genetic modified group and normal group, it is probably because they were dead.
Reflection on the Process
The experiment shows that unlike subjects that requires mathematical calculation, biology mainly assume a possible conclusion based on observation in nature or experience (for this experiment, that cry gene affect the biological rhythm of drosophila), than design experiment. In this experiment, in order to study the biological rhythm of drosophila and how a certain gene (cry) affect it, the experiment separate the variable we want to know (contain the cry gene or not), design two groups (test and comparison) and control the rest variable to be the same.
Connection to Bio-robotics
Since in current level we do not have too expert theoretical knowledge in math, electric engineering, circuit and so on, when making robots we also need more assumption and test then mathematical calculation, and sometimes it is easier.
In the prototyping project, we assumed several possible solution to make legs for our robot, then we use cardboard to do experiments and find the best approach. But we sometimes add to many variables in a single test, for example, we change the body of our robot and the way of connecting the leg parts at the same time.
In the midterm project, we actually made an assumption of a certain probability distribution to calibrate the compass, then after experiment and some modification in arguments it did work.
It shows that the way of biology study and research could also be applied into robotics, and that mathematic calculation is not always the best solution. Sometimes we need to “go back to the nature”, make guesses and just test them.