My definition of interaction:
Interaction is the process in which two people, devices, or a people and a device communicating with one another. This type of communication should include receiving information, processing the received information and giving a feedback, response or creating a certain kind of action according to the analytical results made in the processing stage. This idea is shaped by Crawford’s words “interaction is a cyclic process in which two actors alternately listen, think, and speak” .
Also, to distinguish interaction from reaction, both of the two interacting units should go through these three processes mentioned. They are both actively engaged in a rather continuous communication. Two-way feedback is indispensable.
(An example that aligns with my definition.)
Project: Guten Touch

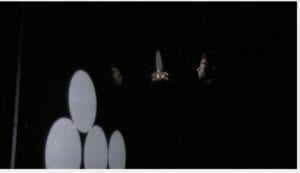

‘Guten Touch’ consists of two projected displays and a multitouch wall.
In one activity, people can stand in front of the wall and use their hands to touch the areas where the projected “foam balls” appear. They can “touch” the “foam balls” with their fingers and move their fingers to throw the foam balls anywhere. Players can even play a foam ball game called “Space Invaders” by throwing the foam balls.
In another activity people can participate in is creating vitual paintings. They can create colorful shapes using a brush or create digital pbjects on the screen using their hands. They can also move their artworks and see the dropping and bouncing of these virtual objects. (For example in the video, a person dumped a box of virtual objects into another virtual box he drew)
For the device, the sensors in the screen detect the pressure of people’s fingers on the screen. Thus figure out the directions in which the fingertips are moving towards. This is the information collecting and analyzing process. Then in response to this, the projected light spots can move under people’s fingertips. (or creating virtual shapes under people!s fingertips) This is the output process.
For people, seeing the location the projected virtual shapes is the imput process. Thinking about where they will move the shapes to is the processing process. Actually using their fingers to move the virtual objects is the feedback or output process. When they see the shapes actually move according to their own wills, a new round of imput, analyzing, output process begins. Also, when multiple players are engaged in this, players can also interact with each other.
The information giving and receiving process is continuous. Both the people and the device are fully engaged in every process that constitute “interaction”, constantly giving feedbacks.
(An example that don’t quite align with my definition.)
Project: Reactive Sparks by Markus Lerner


This is a an installation of seven double-sided vertical screens that is currently in front of the OSRAM main office in Munich, Germany. When cars pass the road in front of the screens, light-colored lines will appear on the screen. Meanwhile, the orange-color waves on the screen rise when the numbers of passing cars increase.
The screens receive information, process it by calculating the height of “waves”, and output the collected datas by visualizing the density of traffic using the height of waves on each screen. However the people in passing cars aren’t responding to the shapes on the screen. It lacks two-ways feedback. It may be seen as a reactive or less interactive project.
Group project: “Heal-o-matic 5000”

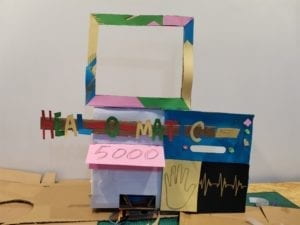

Our project is a medical device that can diagnose people with their illnesses. People put their hands on a specially designed sensor screen and their faces are scanned for their ID. The device will then diagnose people’s illnesses by analyzing the data collected by the sensors and the diagnosis will be appeared on the screen. Meanwhile the relevant medicine will be dispensed.
In our project, a person and a device is communicating. The person sends out information by putting their hand on the sensor. The device receives information by collecting the patient’s health data. It processes information by analyzing the data. It outputs information by displaying diagnoses on the screen.
This device partly reflects interaction. However , after some careful thought, I started to doubt if it is actually a responsive art device.The back and forth process of information exchanging and reacting is somewhat in lack in our project. If interaction still exists in our project, it can be seen as an interactive device that has low levels of interaction.
References:
The Art of Interactive Design, Crawford, Page 1-5
Reactive Sparks by Markus Lerner (https://www.trendhunter.com/trends/moving-art-display-markus-lerners-reactive-sparks)
‘Guten Touch’ Blends Tech and Human Interaction created by Multitouch Barcelona (https://www.trendhunter.com/trends/guten-touch)