Definition of Interaction:
In my opinion, “interaction” means the process of a device receiving signals from other subjects and reacting to it; it either proceeds specific intelligent algorithm or procedure as the response to received signals, finally comes out feedback. It is a conversation between two subjects, including the exchange of information.
Project that aligns with my definition:
Sharing Faces
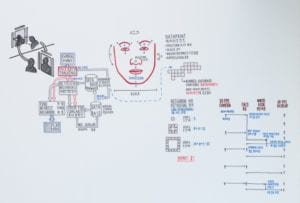
This project aligns with my definition of interaction because its working process requires information exchange with other subjects. When a person looks at the screen, the device matches his face locations and as the person moves, the device pulls out a mirror-like image of others matching the new location (process as picture shows). Without a person moving in front of it, the project cannot work independently. Meanwhile, the face match technology is an intelligence algorithm helping the project come out the interacted result for its experiencers. Therefore, combining the conversation between the users and itself with a “thinking” process, the project aligns with “interaction” in my definition.
Project that does not align with my definition:
Opening Highway
Though the project proceeds specific arithmetic and when people walk close to this project, they can receive information – which is a visual and auditory effect simulating the environment in the highway. However, the effect which the project gives just runs a pre-set independent algorithm instead of responding to other subjects, which means the relation between the project and its audience is not bidirectional; it cannot form a real sense of “conversation” between other subjects and itself.
Our Project:

The idea for Sfeeder originated from a similar experience of many members in our group that during the waiting time for our delivery food, we usually started to do another thing and at that time interruption would be unpleasant, so that sometimes when the delivery food arrived, we met a dilemma of finishing the work in hand first or finishing the food first. Most of time, the result was not perfect: we either found our food was already cold when we put down the work or could not enjoy both eating and working at the same time. Therefore, we thought that if there was a device could feed us while we were doing other things, the problem would be readily solved.
By our design, Sfeeder is a little robot which is able to recognize the masters’ voice and understand their request is for which dish, then it would scan the dishes on the table and deliver required food to the master, feeding him by its arms with knives and folks (could change to chopsticks or other tableware). It would also be able to detect the masters’ health condition and warn the master if the required food is not suitable for his health condition.
Sfeeder follows my definition of interaction because it can “listen” to the master’s requirement and gives feedback in the way either feed the master or give warnings after scanning and analyzing. The process of its work is highly interacted while it has continuous communication with the master. The communication between its master and Sfeeder is bidirectional. Not only the master does enjoy its service, it takes the master’s words as command and carries out analysis with technology as well. By the way, its appearance is also designed by us on purpose. It has hair and arms, that is because we wanted to make people feel close to it; with an agreeable appearance, the interaction between the user and the device would be more harmonious.