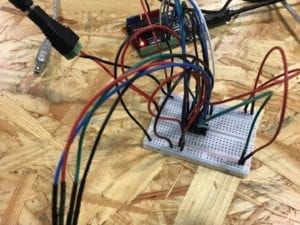
Step 1: Build the stepper motor circuit
In the recitation, I firstly built a circuit that controls the stepper motor. I used an arduino board, a H-Bridge, an external power source, and the stepper motor in this circuit. When the circuit is finished, codes uploaded and connected to power source, I could observe how the stepper motor revolves in divergent directions alternately.
Step 2: Control rotation with a potentiometer
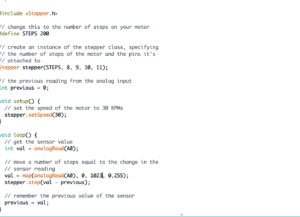
In step 2, I added a potentiometer to the circuit as well as changing the code, so that I can control the direction of the stepper motor as it revolves. The potentiometer is connected to A0 pin on the arduino board, providing analog inputs to the arduino board. After the circuit was completed, I also revised the code. I added in an integer for the A0 pin. Then, I also mapped the value from the analog input towards the output, i.e., from a range of 0 to 1023 towards a range of 0 and 255.
When I controlled the potentiometer, I could change the direction of how the motor rotated by changing the direction as I rotated the potentiometer.
Modified Codes:
Step 3: Build a drawing machine
After I finished my previous 2 circuits, I joined my partner Kathy for the drawing machine task. Kathy and I placed our stepper motors on the motor holder, and we also assembled other components of the machine, including the short and long arms, as well as the motor coupling. We connected both our motors to our arduino boards, place the pen into the machine, and started to control our own potentiometers. It was fascinated to see how different combinations of inputs from my arduino board and from Kathy’s arduino board created unique movements of the pen. The machine created different patterns and lines combining the controls from both motors.

Question 1: What kind of machines would you be interested in building?
I am interested in building a machine embedded in a museum or gallery space. The machine can sense the changes of people’s emotions through facial recognition techniques. By sensing the emotional states of the viewers, the machine can further facilitates an interaction and reciprocal dialogue between the viewer and any piece of art objects. For instance, the machine might be able to project any kind of digital images upon physical art pieces at real time, reflecting or responding to the viewer’s emotional state. The machine bridges the physical but static art space and the digital art space, augmenting the experience one can get when appreciating traditional art objects.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
Daniel Rozin’s Mechanical Mirrors project from the ART + Science NOW kinetics chapter captures my attention the most. Rozin’s piece uses camera to capture images of the viewers of the piece, and transforms images into grayscale pixels. Signals of pixels triggered responses on the actuators, the servo motors. The motors drive changes of small wooden pieces and therefore construct reflective images of the viewers. The artist picked servo motors because they are a kind of rotary actuators that move in angular directions, and they are also small and light-weighted.
The project I made during the recitation is a painting machine, composed with two stepper motors as actuators. The stepper motors enabled the machine to control the pen’s movement in parallel direction. In contrast, in Rozin’s Mechanical Mirrors piece, servo motors could flip wooden pieces over in 360 degrees and construct images in wooden pixels. The artist choose servo motors to achieve this task.