Materials:
For Steps 1 and 2
1 * 42STH33-0404AC stepper motor
1 * L293D ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
For Step 3
2 * Laser-cut short arms
2 * Laser-cut long arms
1* Laser-cut motor holder
2 * 3D printed motor coupling
5 * Paper Fasteners
1 * Pen that fits the laser-cut mechanisms
Paper
Step 1: Build the circuit
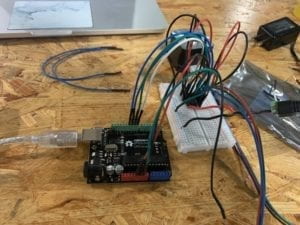
Building the general circuit was fairly simple, but sorting the wires by ground and power was a more difficult task to complete. At first, I was mixing up the different colors of the wires which made going in and fixing the incorrect wires harder to fix. I also made sure to connect all the wires going into ground into the ground on the breadboard first, then into the Arduino itself. Additionally, I did the same for the power on 5V, to simplify the flow of the circuit more.
Step 2: Control rotation with a potentiometer
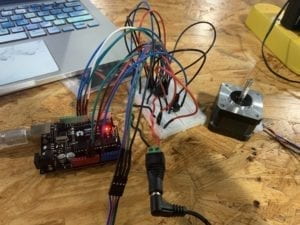
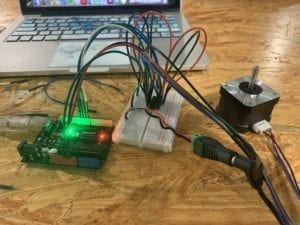
Adding the potentiometer was a bit more difficult, as we had to ensure that the 3 parts of the potentiometer were going to the correct part on the circuit or breadboard. I had problems with the wires going into the stepper motor being too loose, which would result in the motor sometimes barely moving and rotating at all.
Step 3: Build a Drawing Machine!

To build the drawing machine, we first had to construct the parts that held each respective motor and attach them to form a mechanical arm that would become the drawing machine. One problem we encountered was that after we finished building the machines, my motor was drawing even without me controlling it, similar to Douglas Irving Repetto’s Giant Painting Machine that had erratic changes in its drawing patterns. Our finished drawing was very random, with constant changes in the thickness of the stroke or speed of the motor.
Question 1: What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I would be interested in building some sort of machine to deal with crushing soda cans or bottles. When throwing out the trash, crushing cans or bottles would make room for more space in the trash can. Servo motors could be used in a similar fashion to metal forming machines, in which servo motors use their precise motion control to press or bend metal fabrication. The digital manipulation of art could be used to express the amount of space saved by crushing bottles or cans. By using a precise control to press down the metal, it would achieve a greater place in the process of recycling and throwing out the trash.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
One art installation mentioned in the reading is Douglas Irving Repetto’s Giant Painting Machine, in which electromechanical devices built of scrap created wall-sized paintings on transparent Mylar. I like the fact that they incorporated the wobbly suspension and erratic changes of the motor into the drawing, making it incredibly unique and different with other calculated paintings. In comparison to the work we did during our recitation, our drawing motors were not too erratic in motion, instead we were able to calculate how they drew through the use of a potentiometer. I believe the artist selected those specific actuators in order to create a more randomized drawing, with electronics that constantly change the speed and direction of the device.