Drawing Machines
Step 1–Build the Circuit
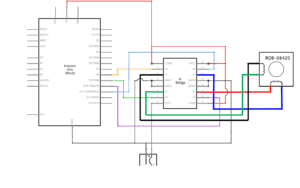
Components
1 * 42STH33-0404AC stepper motor
1 * SN754410NE ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
Diagram
Code
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(–stepsPerRevolution);
delay(500);
}
Step 2–Control the rotation by adding a potentiometer
Components
1 * 42STH33-0404AC stepper motor
1 * SN754410NE ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
Code
#include <Stepper.h>
// change this to the number of steps on your motor
#define STEPS 100
// create an instance of the stepper class, specifying
// the number of steps of the motor and the pins it’s
// attached to
Stepper stepper(STEPS, 8, 9, 10, 11);
// the previous reading from the analog input
int previous = 0;
void setup() {
// set the speed of the motor to 30 RPMs
stepper.setSpeed(30);
}
void loop() {
// get the sensor value
int val = analogRead(0);
// move a number of steps equal to the change in the
// sensor reading
stepper.step(val – previous);
// remember the previous value of the sensor
previous = val;
}
Step 3–Build a drawing machine
Components
2 * Laser-cut short arms
2 * Laser-cut long arms
1* Laser-cut motor holder
2 * 3D printed motor coupling
5 * Paper Fasteners
1 * Pen that fits the laser-cut mechanisms
Paper
Process
Step 1 and step 2 went on rather smoothly. My partner and I then tried to build up the drawing machine with our two circuits. At first, one of the circuits vibrated violently and was hard to control. We then found there was a connecting problem. After adjusting that, it then operated normally. However, when we attempted to complete certain pattern instead of just drawing meaningless lines, we hardly figured out how. The orbit of the laser-cut arms are restrained, but we had no time explore more about how to utilize that orbit rather than being limited by it. We saw other’s work of combination of perfect curves and would like to spent more time on studying how to make better use of the laser-cut arms later.
Question 1:
What kind of machines would you be interested in building?Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I am interested in building the machines that are able to intervene the process of human creation. In my view, the use of actuators in building machines is extremely flexible and highly depends on the purpose of the designer. Actuators can either help people complete certain task or provoke people’s thought on their own behaviors or relation with the outside world. What I have interest in is the latter function of actuators. It is this function that mediates the digital manipulation of art. With the intervention of actuators during the process of creating art, people are no longer the only subject in creation. Therefore, the product turns out to be not only a piece of pure art, but also the result of interaction between the machine and the human creator, which helps us reflect on the relation between machines and people.
Question 2:
Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
I like the work called Kobito: Virtual Brownies made by Aoki Takafumi et al. in 2005. This work makes a link between the physical and the virtual world, representing the convergence of these two. The interesting point is that the connection it has made is bidirectional. Both the physical and the virtual world can have influence on each other. I interpret it as the fact that the invented technology and the inventors (which are human beings generally) inevitably impact on each other and develop interdependently.
Connecting this back to the work I did during the recitation, there is a similarity that the actuators act as mediators in both cases. In the work by Aoki Takafumi et al., the actuators are the magnets controlling the movement of the physical object. They mediate the intention of the little creatures in the computer screen into the physical world. In my work during the recitation, the motor has been used as the actuator of the laser-cut arms. It mediates the intention of the human creator to draw, along with the intervention of the constrained movement of the laser-cut arms. Through this kind of mediation, we are then able to reflect on our interaction with the designed technology.
The effect of mediation brought by actuators is also the purpose of selecting proper actuators. The artists Aoki Takafumi et al. selected those specific actuators with the aim of rather fluently displaying in the physical what is happening virtually. That is to say, the choice of actuators has to align with the principle of convenience and purposefulness.