This week, my partner Fay and I worked on the circuit of the Drawing Machine. We are asked to build a circuit that can control the movement of the laser-cut long arms to make it as a Drawing machine. During the process of this session, I come to understand how the H-bridge works. However, we run into a lot of problems during the recitation and we even stay for an extra 15 minutes to complete our circuit.
Materials:
For Steps 1 and 2
1 * 42STH33-0404AC stepper motor
1 * L293D ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
For Step 3
2 * Laser-cut short arms
2 * Laser-cut long arms
1* Laser-cut motor holder
2 * 3D printed motor coupling
5 * Paper Fasteners
1 * Pen that fits the laser-cut mechanismsPaper
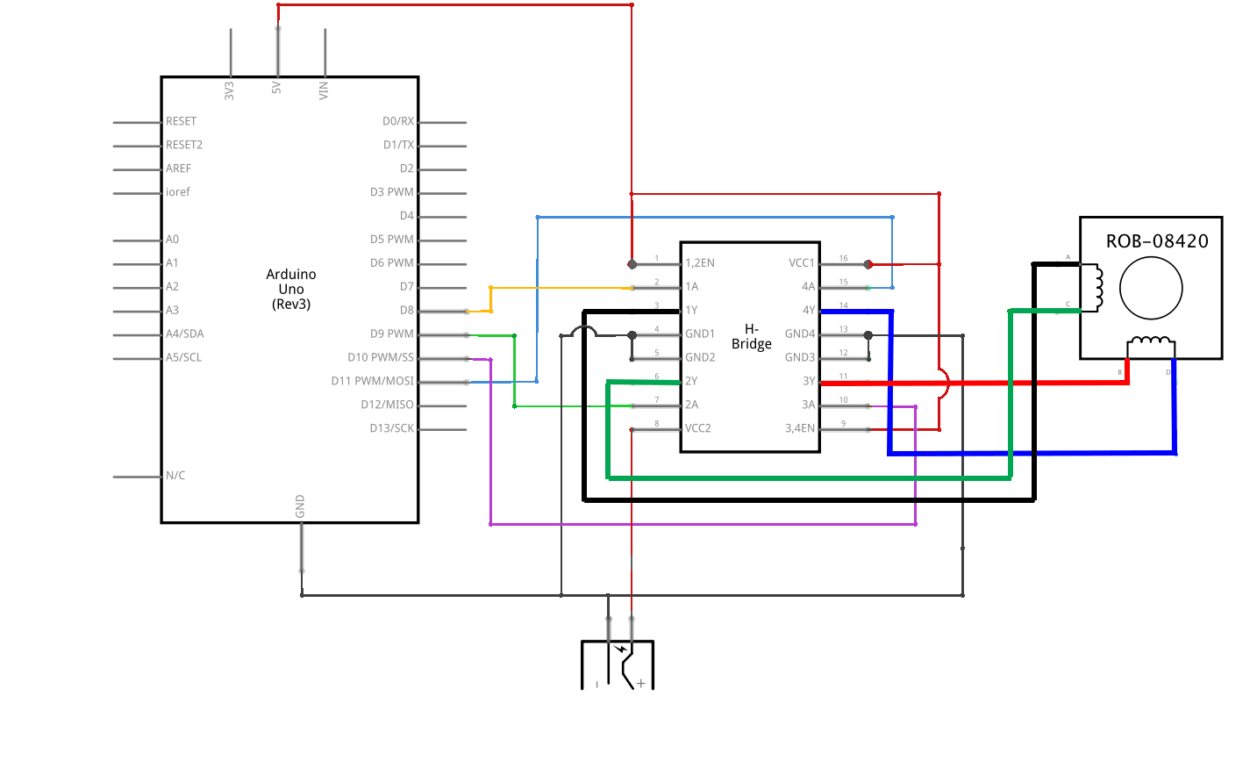
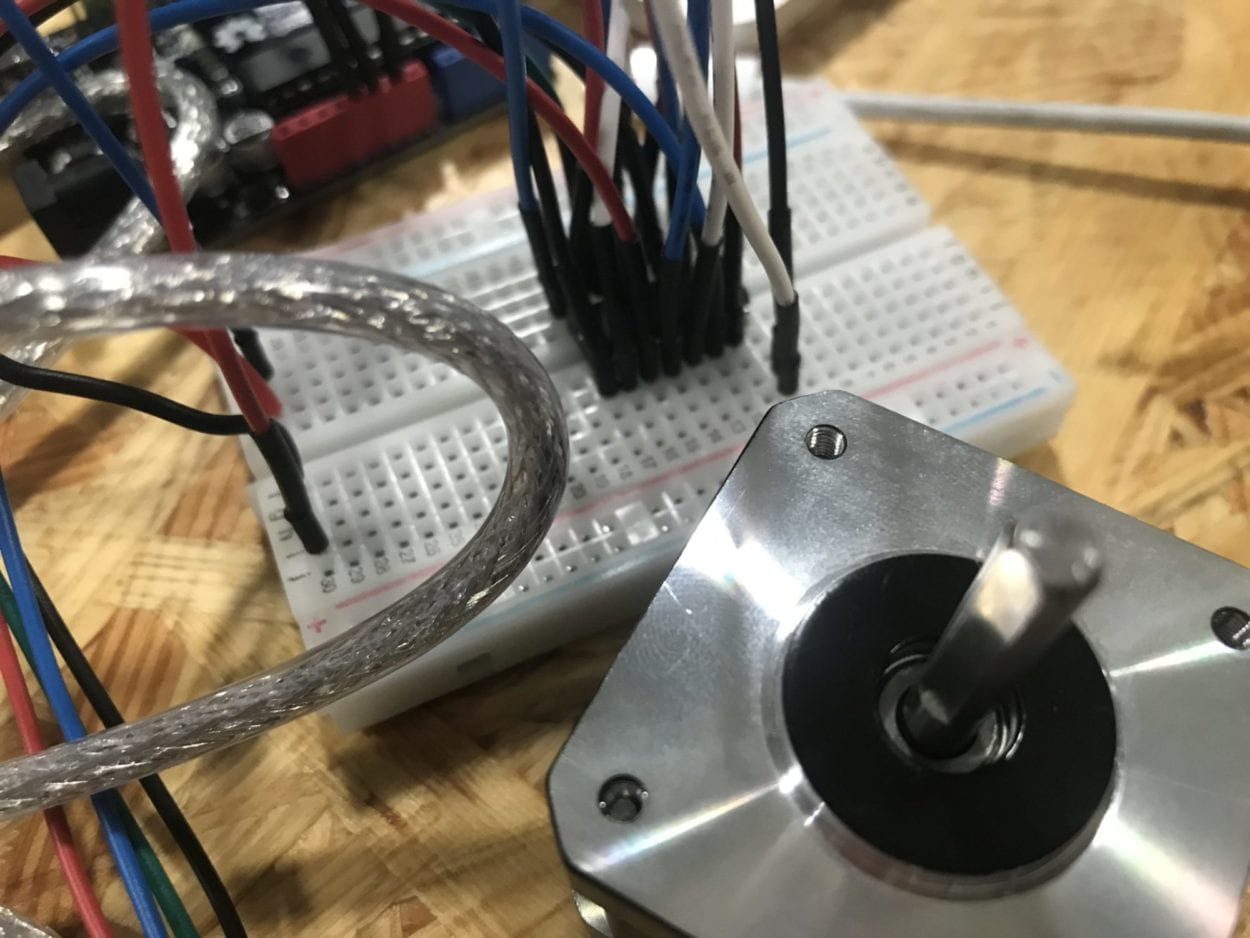
Step 1: Build a Circuit
The first is to build a circuit that makes the motor rotate. This step is the most challenging to us because the schematic is the most complicated one I have met so far. I have made many mistakes like forgetting to separate 5V and 12V power, putting the H-bride into wrong direction and forgetting to connect to the right port. Fortunately, after asking for help from the fellows, we successfully makes the motor rotate smoothly.
Step 2: Control rotation with a potentiometer
Then we work on how to control the motor. First, we add a potentiometer in the circuit. After that, we write a code about “MotorKnob”. So by combining these two parts, we can use the potentiometer to control the rotation of the party.
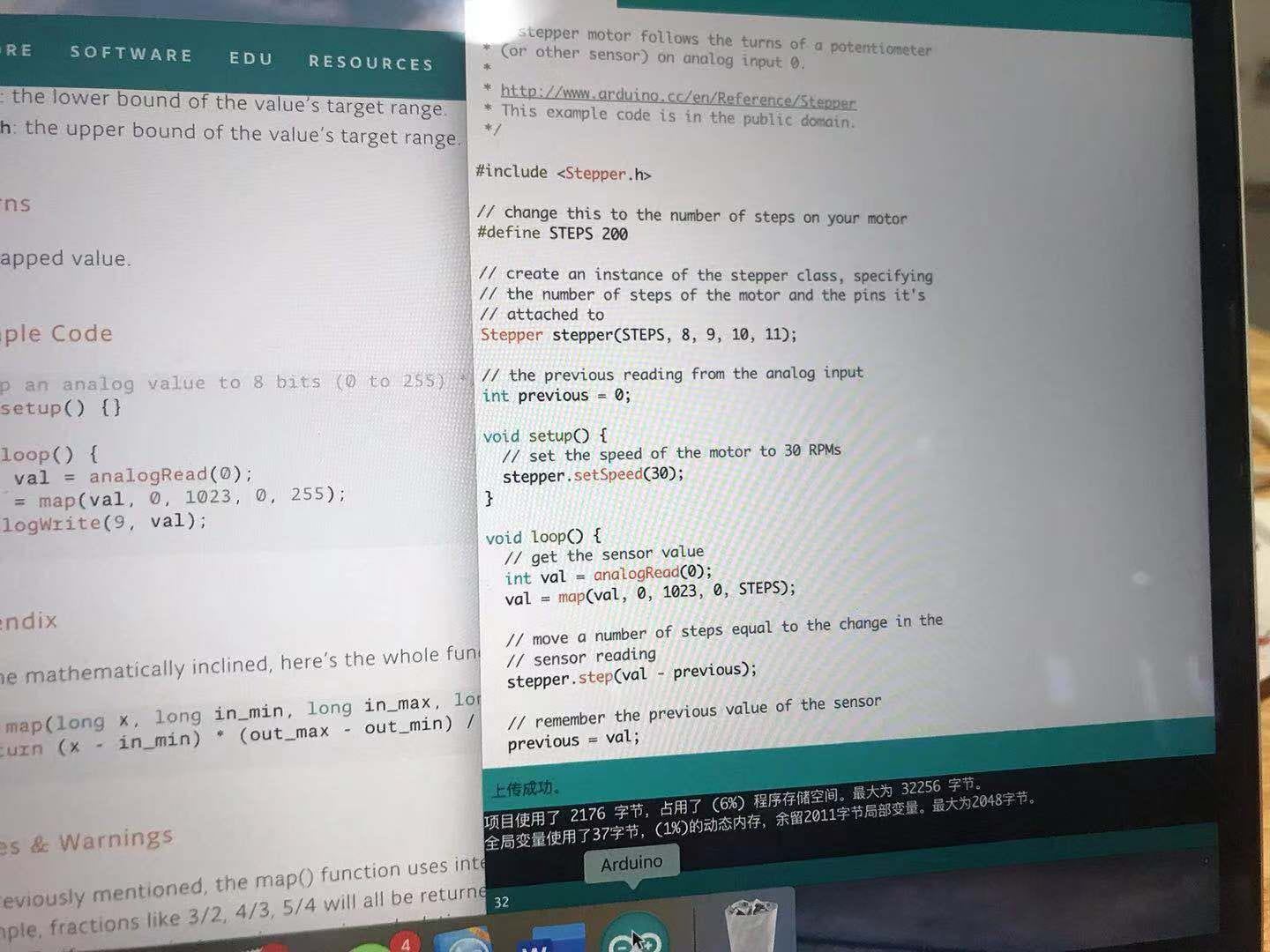
The motor rotates when we switch the knob.
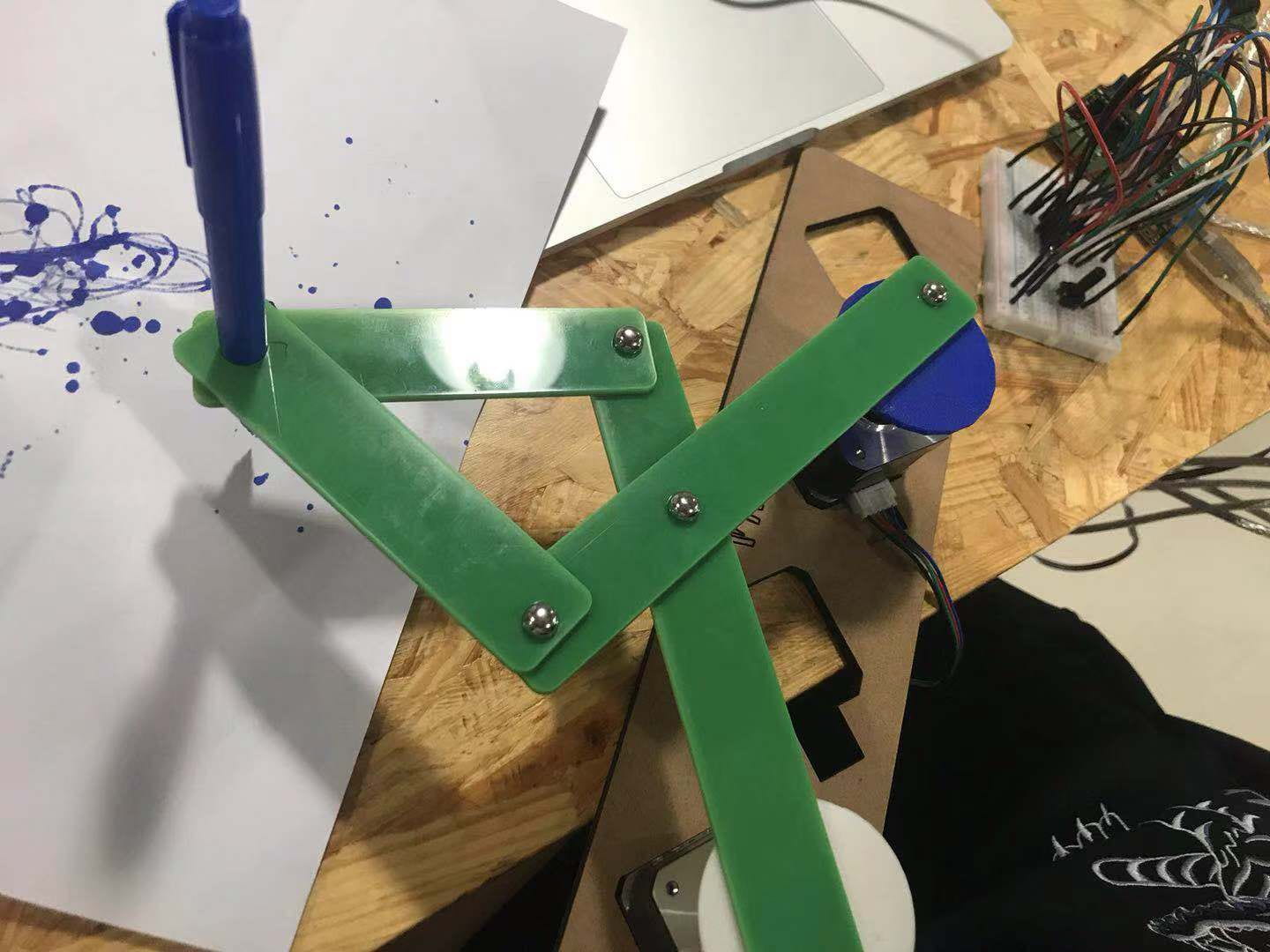
Step 3: Build a Drawing Machine!
The last step is to build a drawing machine. We assemble the laser-cut arms, the motors, the pen and other items together. We can switch the knob to control the route of then pen, then, as a result, the pen draw the pattern we want on the paper.
Question 1:
I am a animation fan and a figure collector, so the machine that I am interested in is a kind of interactive animation figure. There are phone games that when you touch an animation character, he or she will make reaction differently based on which part of his or her body is touched. So my plan is that when we touch this kind of interactive figure, the joints of the figure body will make movements and makes it looks like the character is reacting to your touch. And maybe we can add more reaction to it, like making the figure “speaks” the famous lines of the characters and making easy conversation with the users . There are actuators like motors and servos used in this machine to realize the movement. This is a kind of way that make the art form “sculpture” more interesting to us.
Question 2:
I am really fascinated by the Feral Robot Dogs, by Natalie Jeremijinko in 2006. The robot dogs can detect the pollutions by using a sort of pollution sensor. Once the dog sense the pollutants, it will display dog-like behaviors like barking and jumping up and down to show a kind of “anger” towards the pollution phenomenon. The dogs are used to help create a community focused more on environmental issues and make the robots more vivid. He use actuators like servos and stepper motors to imitate this sort of dog-like movements with reaction to the pollution sensors.