IN this recitation we implemented a useable stepper motor and used it to make a drawing machine.

It is the most challenging task so far in all the recitation, as we needed to manipulate several units whose working theory we are not entirely familiar with, such as the H bridge. Only by following the graph on the webpage it is quite easy to make mistakes. For example I had my H bridge up side down the first time. My stepper motor could not work, my Arduino went hot and my computer cannot recognize my Arduino. I thought I burned the board but luckily it didn’t (I heard someone did damage his board in our recitation). With the help of Rudi and Jingtian I finally found the problem and corrected the circuit. It is a very difficult task to check the correctness of the circuit as all the wires are put in the tiny breadboard and we have to check them one by one. So we should be really careful when we make the circuit so that we don’t find ourselves troubles afterwards. Also, most important lesson: the part with a semi circle is the top of a H bridge!
Finally we succeeded in making a drawing machine.
Later I researched more details of H bridge on the Internet so that I can fully understand it and use it to develop other project by myself later:
Some of my materials: https://www.build-electronic-circuits.com/h-bridge/
During the research I realized it is the protection diode that saved my board.
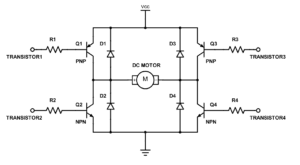
A graph I downloaded as reference for later use of H bridge.
I also checked the PPT in the lecture for better understanding.
Question 1
The use of stepper motor made me realize its power in precise rotation. Therefore we could use it to achieve highly quantified acts, in quantified arts such as robot drawing or robot that plays some musical instruments. Yet we should always remember it does not create art. Human creates art and programmed the actuators. The actuators are pens but not artists. Therefore to make the machines “more creative” and “real artists independent from human”, I’d like to make a machine do what a drawing practice do: to facsimile a painting. Yet instead of programming it directly to tell it how to move on the paper, we let the machine “see” a real photo using a camera and let it calculate how to draw it on the paper.
Questing 2
The large spider robot that takes a whole page is really eye catching. While what we made at recitation and the robot are clearly not at a same level, our robot painter, if we remove the pen and connect it to some other moveable part, what we made in recitation could actually be a part of the robot’s joint or leg. In the article it mentions that the robots also communicate and interact with each other, and can learn in the interaction and can collaborate with each other. It reminds me of the swarm robot I learned in another course. It seems that interaction can be achieved not just human-machine and human-human but also machine-machine, where different machines each with relatively simple function forms a complex system.