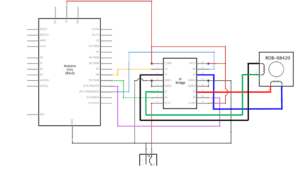
In week 4 recitation we are tasked with building a circuit that controls a motor with the analog input of a potentiometer. Then we can combine our motor circuit with someone else’s motor circuit, using 3d printed parts we can create a drawing machine with arms controlled by two different motors.(Schematics below).
Process:
The building of the initial circuit was good. The H bridge is capable of switching the polarity and also the center to this circuit, so I placed it in the center first, then worked around it for efficiency. Then I added the potentiometer, which caused some error in the functioning of the motor. I later found out that it was because I haven’t modified the code so that the values of analog input is mapped from 1023 to 200 which is the steps of the motor.
Videos:
Working machine
initial circuit without potentiometer
with potentiometer
tried drawing without the arms connected and accidentally drew on my laptop
Modified Code:
/*
* MotorKnob
*
* A stepper motor follows the turns of a potentiometer
* (or other sensor) on analog input 0.
*
* http://www.arduino.cc/en/Reference/Stepper
* This example code is in the public domain.
*/
#include <Stepper.h>
// change this to the number of steps on your motor
#define STEPS 200
// create an instance of the stepper class, specifying
// the number of steps of the motor and the pins it’s
// attached to
Stepper stepper(STEPS, 8, 9, 10, 11);
// the previous reading from the analog input
int previous = 0;
void setup() {
// set the speed of the motor to 30 RPMs
stepper.setSpeed(30);
}
void loop() {
// get the sensor value
int val = analogRead(0);
val = map(val,0,1023,0,200);
// move a number of steps equal to the change in the
// sensor reading
stepper.step(val – previous);
// remember the previous value of the sensor
previous = val;
}
Reflection:
I really enjoyed this weeks recitation as it gives us a taste of what is achievable even with our current knowledge of engineering and coding, it is a great combination of what we have learned so far. With the assistance of 3d printing, we are able to create something that actually can have applications in real life, if more time was spent on developing the code for the drawing machine, we can potentially make automated writing robots. I had a lot of fun creating the machine, and very surprised how little it is to make something cool.
Documentation questions:
Q1:What kind of machines would you be interested in building?Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I am interested in building machines that are capable of bringing human interaction closer to the digital world, the drawing machine that we created for this recitation would be a great example, it is fairly useless in terms of actually being used for writing or drawing, but it acts as a tool for the user to interact with the machine and get it to act accordingly with the actuator. These types of machines enables us to interact with art in a new way, unlike the traditional way of only being able to draw with a pen, we can now have new ways to draw, such as a drawing machine. Even if the machine is hard to control, it is a way to offer us a new perceptions of how art can be created and opening up new possibilities and a new creative process.
Q2:Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
out of the projects mentioned in the reading, the one that stood out to me was the drumming robot. As a drummer myself, I often find myself questioning the meaning behind the music that I am playing. With advancing accuracy in the field of midi softwares, the only advantage of having real musicians play instead of machines would be the subtle differences that the midi signals can’t replicate perfectly. With the robot drumming through actual physical bodies made possible by appropriate actuators and circuits for drumming just like the ones we made in recitation, the only difference being that the ones we made was for drawing rather than drumming, it takes digital music to another level.