Step 1: Build Circuit

Image from https://wp.nyu.edu/shanghai-ima-interaction-lab/category/recitations/
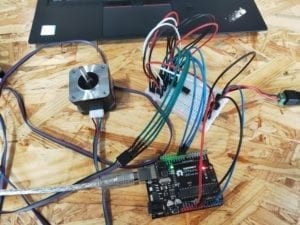
I followed the diagram to build the circuit. And I loaded codes stepper_oneRevolution from Arduino>File>Examples>Stepper>stepper_oneRevolution. By running this code, the stepper motor would turn revolution continuously.

Step 2: Control rotation with a potentiometer
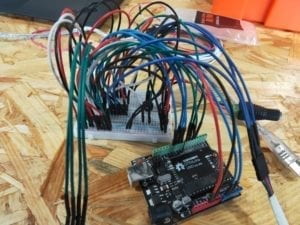
In this step, I added one potentiometer to the circuit and loaded code MotorKnob from Arduino>File>Examples>Stepper>MotorKnob. By rotating the knob of the potentiometer, the rotation of the stepper motor would change.
Step 3: Building a Drawing Machine
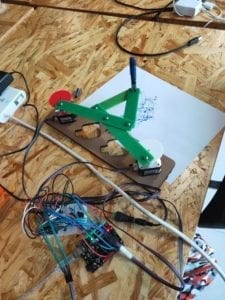
By doing step 2 twice, I got two controllable stepper motors. I fixed them on a laser-printed panel and installed a mechanical arm on them. Then a drawing machine was done!
Questions
answer 1
I want to build a device that can help me fold the clothes. Everyone here needs to do laundry at least once per week. However, folding the clothes after the laundry seems to be troublesome to me. So, I want to build a device to help me solve this issue.
The device should be able to fold the clothes. Thus, it has several mechanical arms driven by servo motors, which can be accurately controlled to move at any given speed and stop at any given position. Also, there should be a camera installed so the machine would be able to detect the type of clothes it is going to fold.
answer 2
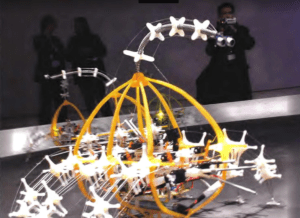
In Ken Rinaldo and Matt Howard’s “Autotelematic Spider Bots”, the robots would form a community where each individual mimics the behavior of real ants and spiders. They aren’t controlled by humans, instead, they are able to sense others through ultrasonic camera eyes and infrared cameras and communicate with others. In the recitation, our drawing machines are controlled by potentiometers which directly receives information from humans. In contrast, the spider robots here don’t require any control. They are mostly self-controlled and interfered by other members of the community. I guess the artists chose servos here as the actuators. This is because servo motors are accurate, and with them, we can determine the exact posture of the robot.