INTRODUCTION
For the midterm project, we made a bio-inspired robot called Migratory Cat, which can simulate the behavior of migratory birds.
- It can automatically start when the color of the land turn yellow (or white) from green, which indicates the change of the season.
- It can move directly to the south or north, like the birds.
- It can avoid the barriers in its way without moving backward. (Since migratory birds can slow down but not move backward when flying.)
- Its behavior will become unstable when being stimulated.
- It can stop migrating when it arrives at the destination with green land.
INSPIRATION
When looking upon the sky, we gain inspiration from the observation. The migratory birds’ behavior of seasonally altering their habitat makes us curious. How can they move so directly to the south in autumn and move back in spring? How can they avoid the barriers in their way without flying backward? How can their migration start and stop automatically in different parts of the earth? How will their mind and behavior change when they were stimulated? These facts interested us and inspired us to learn more about the theory. Hence, we start to look for some research paper to achieve it.
We first searched for the scientific journal about the way how migratory birds detect the direction of migration.
Then is the psychological change when they are facing stimulation.
In the two scientific journals above, we learned that the birds can migrate to the destination by detecting the earth magnetic field and therefore confirm its direction. In addition to the way they travel, we also learned about the psychological change they face when they meet some unexpected problem during the flight.
ALGORITHMS
After we draw the overall algorithms by analyzing the aims we would like to achieve, we started the programming part. (The algorithms drafts can be found in the vlog at the end of the report.)
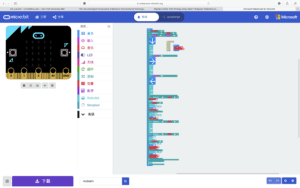
We first used python to do the programming part and applied mu-editor to load it into the robot. However, the micro: bit can only show the syntax error letter by letter, at least 1 minute is needed for it to broadcast 1 syntax error, hence it was not efficient enough for us to adjust the code while taking care of the syntax error.
Therefore, we change our programming language from python to the makecode. In makecode, the algorithms can be more clear when presented by blocks and patterns. And also, we can combine it with javascript to optimize the code by statistic knowledge we learned in math class.
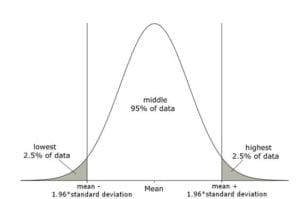
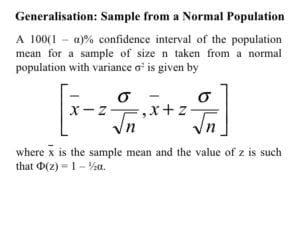
Kris took charge of the compass part, using an approximation of the normal distribution to calculate the expectation as well as sensors’ errors to make the compass function of the robot more precise. Also, he is the one who applied the psychological change to the robot.
As for myself, I took charge of the realization of starting function, moving forward function, avoiding function, stopping function, as well as music function with servo, motor, IR reflective sensor, and supersonic sensor. Besides, I help Kris with the basic direction function with the compass.
VLOG & IN-BUILDING PRESENTATION
Kris also made a vlog of the whole progress of the development of our migratory cat.
I also made a presentation without the compass function in the academic building. (Since the magnetic field in the building is unstable for some reason.)
FURTHER IMPROVEMENT
Since time is limited, we didn’t manage to achieve all the function we have thought at the beginning of the lab. If we can have more time to make progress, there are 4 points we still want to improve.
- Find a better sound sensor for the robot to detect the distance between it and the sound source by the volume of the sound. (The code was actually already finished at the very beginning, but unfortunately, the sound sensor failed to meet the criteria.)
- Since it is too hard to change the environment for the robot to gain real-life stimulation so we used buttons to simulate the condition. It will be much better if we can use sensors to get real-life input to make it more biological.
- Because of the limited pins to read the input of sensors (most of the pins of the kittenbot is write only), we can’t afford an extra supersonic sensor for the robot to detect whether it should turn left or turn right, so we make it turn left for a time, and turn right for a time, to make sure it will not be too left or too right at the end of the migration.
- We also wanted to make the following function between two migratory bots. However, due to the limited time, we didn’t make it out.
It was a big challenge and fun experience of making our own bio-inspired robot. We still need to focus on the inspiration that biology brings to us, and try to apply the useful and meaningful points of it to the new robot system during our further studies.
REFERENCE
Whybrow P.C., Akiskal H.S., McKinney W.T. (1984) The Neurobiological Foundations of Behavior: Environmental Challenge and Response. In: Mood Disorders. Critical Issues in Psychiatry. Springer, Boston, MA
https://link.springer.com/chapter/10.1007/978-1-4613-2729-5_6#citeas
Mbaeyi P.N. (1984) Migratory Birds: Path-Finding Using Madar? (Magnetic Detection and Ranging). In: Varjú D., Schnitzler HU. (eds) Localization and Orientation in Biology and Engineering. Proceedings in Life Sciences. Springer, Berlin, Heidelberg
https://link.springer.com/chapter/10.1007/978-3-642-69308-3_63#citeas