PART A
Step 1: Plan
I decided to build a Driven: the light seeker.
I chose it since I think it’s a great idea if we intend to maximize the solar power board on a vehicle. And also, it can be used as a carrier vehicle that can be guided by glare (e.g. a flashlight).
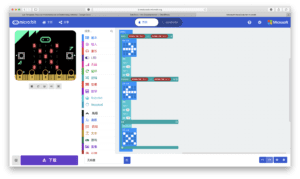
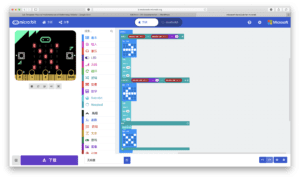
Step 2: Program
Step 3: Document
When building a light seeker, I want to learn more about kittenbot. Therefore, instead of borrow light sensors in the equipment room, I followed Rudi’s advice to learn how to use the sensors beneath the bot.
The most difficult part is the connection. Since the manual and the kittenbot website didn’t show enough information about it, I tried more than ten times testing the pin with some help of the description in Microsoft makecode about the pins. At last pin0, 1, 2, 8 appears to be the pins that can read values while the others can only write. (I guess some of the ‘S’ ports can also be read?)

PART B
Step 4: Draw

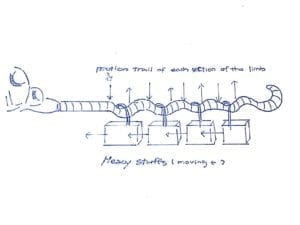
This device can carry pieces of stuff at a permanent interval. And also, it can be applied to carry them from the top left(right) corner to the bottom right(left) corner. Moreover, it can adjust the attitude of the hooks by bending and stretching the limb to maintain the boxes’ stability.
Step 5: Analyze
The sunflower, in my opinion, is a light seeker in the real world.
Therefore we can consider the mobile I built in Step 2 as a sunflower in the animal version. It keeps chasing the sun and absorbing the sunlight to its solar power board (if it has one).
Step 6: Remix
The detection of the light and shallow is appeared to be so sensitive and sometimes occurs some errors because of the inaccuracy of the sensor.
Therefore, I applied some add operation to modify the critical values and the problem was fixed.
Step 7: Reflect
The main difference between my approach and the one done by MIT as described in the article “Braitenberg Creatures” is that, the one done by MIT stresses more on the modularity. Therefore, it can simply replace a sensor or brick to achieve different functions.
The similarity is they are both robots that can simulate biologic behaviors.
In the thought process, I stressed a lot on how can I achieve the light seeking function to make it looks like a creature, but think less about the universal structure. Therefore, the program I wrote is more like a particular program for this exact mobile, but not a program that can easily alter the sensor into the others and achieve different function.
Maybe in the next project, I can gradually create a universal structure for most of the sensor I can apply. Then I can easily replace the function to the new one that I may need in the future. And also save time to focus more on the other aspects of the project.