Inspiration Stage
Our group actually cycled through various animals during the inspiration stage. Our first brainstorm revolved around the jellyfish, and how it navigates in the water through the use of pulsating movements. From our understanding, if we wanted to achieve this locomotion in the air, we needed to have a mechanism that allowed it to float. Of course, that’s when we realized we needed helium balloons to do so, and set out prototyping a solid base to hold the balloon and motor.
Our initial sketch:

As you can see from this photo, we came to the consensus that the ‘robot’ would have to be a collection of small balloons that held up a small stepper motor. The motor’s purpose would be to pull a thin pole (attached to the top of the jellyfish) back and forth, creating a pulsating motion that would allow the robot to push itself in the air. Strangely, the most difficult aspect of putting this plan into motion was that helium was quite hard to find, and since we didn’t want to order a huge tank of it through TaoBao, we were left with little options. That’s when we came across this video describing the creation of a self-stabilizing flying robot:
It turns out that the robot was created by a group of mathematicians at NYU, and that it is actually the first flying bot that possesses the ability to stabilize itself in the air without the use of sensors. To put it simply, the contraption is constructed from thin carbon fiber wire, and fitted with four wings. The robot is essentially ‘hollow’ in that the body is purely made up of the wires, and it is able to fly because the wings move at slightly different times relative to each other. The entire device also weighs 2.1 grams, and is not much larger than a dime. Our group was very enthralled by this project, and we thought that maybe we could recreate this, but at a larger scale.
However, as with any prototyping idea, it fell flat. Our main problem was that our body was just too heavy to fly:


Despite having made some quality wings, we all agreed to scrap this idea as well.
With the deadline coming up, we began to search for an animal movement that we could replicate using simple mechanisms such as pulleys and gears. Diana proposed that we replicate a frog’s jumping behavior, and we found several videos that described in detail how frogs managed to leap into the air. However, we were hesitant to fully commit to this idea, as frogs jump extremely high, and we weren’t sure if we could generate enough power to lift the robot into the air in that fashion. Therefore, we began looking at a toad (which moves more clumsily), and finally, our breakthrough was discovering this fish called the Mudskipper:
I thought this was especially fascinating, in that the fish was able to use its fins as propellers to navigate out of water. Although at first glance, this doesn’t seem like the most efficient way of moving on ground, a closer look will reveal that the fish can actually nudge itself along the sand quite quickly. Given the fact that it is still indeed a fish, I was really inspired by the versatility of how it uses its fins. According to our research, the mudskipper’s pectoral fins are located at the frontal area of its body, and its unusual shape is what allows it to ‘skip’ across land. The radial bones within the fins are elongated, and stretch out from the body, creating two ‘segments’ or joints that are quite similar to small arms. Here is a close up demonstration of the fish moving on land:
As you can see from the video, the fish moves by placing its elongated fins onto the ground, and then pushing away, generating enough force to propel itself forward. In some cases, the mudskippers have been recorded to be able to leap up to distances of 2 feet.
Our group thought this was the perfect organism to base our locomotion on, so we set out to create a prototype using cardboard.
Creation Stage
Before creating our frog-themed mudskipper organism, we wanted to set some guidelines to follow:
- The fins of the organism needed to be strong enough to support the entire base (including motor and battery), while at the same time, light enough to be lifted by the motor
- The pulley system is the most ideal for tackling two-fin rotation motion, as we only need one motor to move multiple fins
- The fins will most likely have to be equilateral triangles, as this allows us to focus the force of the pulley system to one point, as well as stabilize the entire structure (the triangle shape technique was heavily influenced by youtube videos we watched describing how to create stable structures out of soft material such as paper and cardboard)
- Lastly, our first priority should be getting the robot to nudge itself along the ground; if we end up with extra time or resources, we could make the robot jump like a frog
With these guidelines in mind, we ended up with a solid prototype structure:



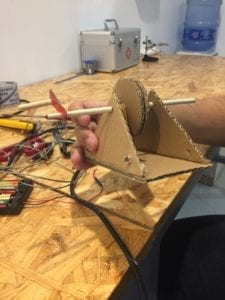



As you can see from these photos, our entire organism is made up of four triangles, connected in parallel by wooden sticks. The base is one rectangular piece of cardboard. Here is a demonstration of the rotation movement we managed to create:
To be quite honest, despite the prototype looking a bit rough, we were really happy with achieving the rotation we wanted from the pulley system. The main problem however, was that the hinges of the sticks were too soft to support the full rotation of the fin. As a result, the fin would rotate halfway, then either stop or break off. We knew that to remedy this, we would have to laser cut wooden pieces to act as the rectangular hinges. The rest of the cardboard body however, worked fine, so we decided to just use more reinforced cardboard for the final prototype.
Final Product Stage
The Final Product:








The final product in motion:
Our final product was definitely more polished than our prototype, due to several refinements to the sticks and triangle pieces. We sharpened the ends of the sticks in order to provide better penetration abilities, and Anand reinforced the edges of the cardboard through the use of masking tape, which was a good touch. We did run into a major problem however, in that the pulley system was too weak to rotate the newly structured fins. We were stumped on this problem for a while, until Rudi saved the day by proposing we use more than one rubber band for the pulley system. By making the rubber band thicker, we ended up creating faster rotation, resulting in the the organism being able to propel itself across the floor.
Demo:
Reflection Stage
I think our whole group can agree that this lab provided valuable experience in terms of prototyping and ideation. We had to run through multiple inspiration and prototyping stages, as well as tackle problem after problem regarding our robot. I think one of the reasons why we were able to efficiently address these issues and produce a working robot was that our group dynamic was very fluid and well structured. We were all very receptive of each other’s ideas, and often bounced inspirations off of each other’s suggestions, resulting in a more polished, refined goal. We were also in sync with the guidelines each of us proposed, and quick to come up with solutions that we all agreed upon to address problems that we faced during the creation and prototyping stages. As for our end product, I personally am very satisfied with the mudskipper robot, both in the movement we managed to achieve, and the overall design. I think that our group was actually a bit awed when the robot propelled itself across the floor during the first test run, because we honestly didn’t expect it to move, after going through countless trials and reiterations. In terms of improvements, I think that if we had more time, we would figure out a way to increase the power of the pulley system and reduce the weight of the fins to make the robot jump like a frog, rather than crawl across the sand. However, ultimately, I am quite happy with the lab results, and hope to incorporate what I learned in this process into my final project.