Inspiration:
Justin and I were inspired by the metal case of the Kittenbot. The metal body of the Kittenbot resemble shell of turtle. Thus, we got an idea to imitate the locomotion of a turtle.
Prototyping:
First step, in the first lab, Justin and I searched for some turtle locomotion videos on the Youtube. We found out that when turtle moves forward, its two forelegs and two hind legs moves in the opposite order so that it can crawl forward. Based on that observation, we build a Lego model.
We can see that the transmission shaft connect two forelegs and two hind leg and it guarantees that two sets of the legs can move in the opposite direction but at the same angle at each time. Also, the center of the transmission shaft is always on the center axis of the whole prototype. It means that we may only need one motor to make the whole turtle locomotion robot.
Second step, build a prototype. For the reason of the illness, I missed the second lab. In the second lab, Justin built a prototype. Instead of the model of drive we built in the first lab, Justin built a two servo model because there is no such motor can do a linear locomotion as the Lego prototype we did in the first lab.
Third step, improve the prototype. In the third lab, I modified the material used on the claws of the turtle. I turned forelegs into omnidirectional wheel and hind legs into eraser. The idea comes from the turtle locomotion of a turtle toy. The erasers will offer fraction to make the robot move.
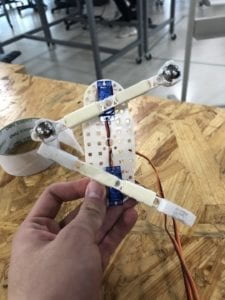

In this way, the turtle robots succeeded in moving forward by moving two sets of legs in the opposite directions at the same time.
Since it is not convenient to control the robot from the micro:bit connected to the robot by wires. We decided to attach the robot:bit onto the robot and used a remote control to move the robot. The final product is showed below.

However, we find out that once we use remote control, we cannot move two sets of legs at the same time, we can only move one set of legs once. .However, we find out that, even in this situation, the turtle robot still can move forward, but this time, it moves in a much slower speed. The video shows the robot move away from the eraser.
Reflection:
The prototype is very rough. When the robot is moving with two sets of legs, we found a rather serious problem that we have to control the timing of moving these two set of legs manually and the timing must be precise. If the timing gets wrong, the turtle may stay at the same position without moving. But we also notice that besides moving straight forward, our turtle robot can also veer, the only thing we need to do is to adjust the timing of moving two sets of legs. Thus, if we can find the precise timing of moving two sets of legs, we can build a turtle robot which can move and veer freely. This is possible to achieve by programming. We may develop it further into a mature robot in the future (final project). Anyway, the locomotion and prototyping labs are interesting and helpful.