Assignment Overview
The purpose of this assignment was to move forward from our midterm projects, by conceptualizing and implementing a new form of motion besides the conventional motor-powered wheels.
Duck Motion
Konrad and I drew inspiration from ducks for our locomotion project. We were intrigued by their waddling motion and how their short, skinny legs are able to support their proportionally large bodies both on land and while swimming. Ducks move on their flexible two feet by putting their bodies in a bounce-like movement between left and right side, while also rotating their backs to the opposite side of their stepping foot. We set out to create a robot that moves similarly to ducks, and decided to create our own duck legs to mimic the video below:
Prototyping
From the very first class, we started prototyping right away. Our very first rapid prototype was attaching two plastic “legs” on the Kittenbot chassis, which was very heavy because it was made of steel. Hence, we had trouble with getting it to balance, so it could not move or even stand properly without falling over to one side. We also made ridges out of hot glue on the bottom of the cardboard duck feet, for friction.
First prototype:
On our second prototype, we tried using dead batteries as a weight to balance out the microbit and allow the duck robot to move properly. This did improve our project because now the “duck” was able to stand upright. However it was still not able to move properly, even after we added poles on both ends of the duck to help with balance.
Second prototype:

Final Model and Presentation
Taking into account our failures and lessons from earlier prototypes, we realized that we needed to move away from the Kittenbot chassis because it was too heavy. We also decided to revisit the mechanism of our legs. At first we considered creating our own wooden wheel with a leg that moves around it, as shown below:

We quickly moved away from the idea when I found an online example of a robot that realistically mimics the waddling movement of a duck, and also showed solutions to our previous problems.
Online example:

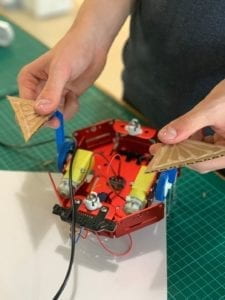
So, we modelled our duck after this template and laser cut our own chassis to make it lighter. We did not copy this model outright however, and made our own modifications such as using two DC motors instead of one and using mostly wooden materials.
Unfortunately, I was out with the flu during our final presentation so Konrad had to showcase our project on his own. This is what our final duck robot ended up looking like:

