With Haiyan, in this recitation, I built a drawing machine and have a better understanding of the H-bridge. We each complete the first two steps individually and then cooperate to make the machine work.
Materials:
Steps 1 and 2
1 * 42STH33-0404AC stepper motor
1 * L293D ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
For Step 3
2 * Laser-cut short arms
2 * Laser-cut long arms
1* Laser-cut motor holder
2 * 3D printed motor coupling
5 * Paper Fasteners
1 * Pen that fits the laser-cut mechanisms
Paper
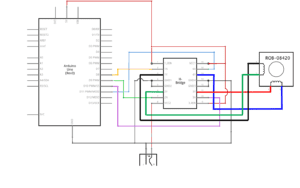
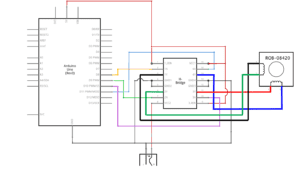
Step 1 Build the circuit
We need to build the circuit with H-bridge to control the motor to let it rotate smoothly. Here is the diagram:
Here I want to stress the mistake that I made. First, it is really important to keep the 12V and the 5V separate to each other. Thanks to the help of the assistant I did not fry my computer. Secondly, the use of the H-bridge needs to be paid attention to. The circuit did not work at the first because I plug it upside down. This semicircle indicates where the front of the IC is. The correct way to use is this:

After copy the example code, the motor worked.
Step 2: Control rotation with a potentiometer
In order to control the motor, I use the map function to connect the potentiometer with the motor which is simple.
Step 3: Build a Drawing Machine
Here is our “masterpiece”.

Question 1:
What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
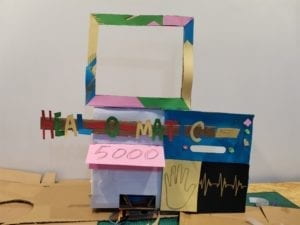
Answer: I am interested in building a machine that allows people to know their physical state, such as when to sleep or when to do physical exercise. The machine can be built in the form of a bracelet to examine the body. My inspiration comes from the cases of sudden death of people who stay up late to work or study very often. Though they do not realize, their bodies need rest. With the machine, we can have a clear view of our body and save ourselves before it is too late.
Question 2:
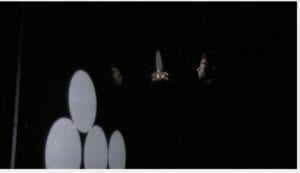
Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
Answer: I like the blanket project which differs from the drawing machine I built. While the drawing machine needs to be controlled by human beings, the blanket can automatically find its “target” using the sensor in it. I think the artist may want to solve the problem that the blanket always be kicked off while we are sleeping. The interactive process is clear that when the person move or change gestures, the blanket follows.