Materials:
For Steps 1 and 2
1 * 42STH33-0404AC stepper motor
1 * L293D ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
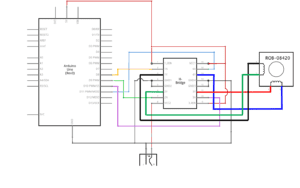
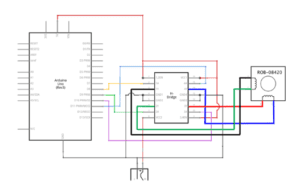
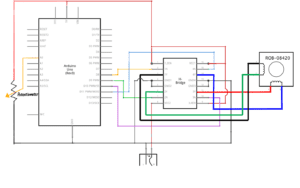
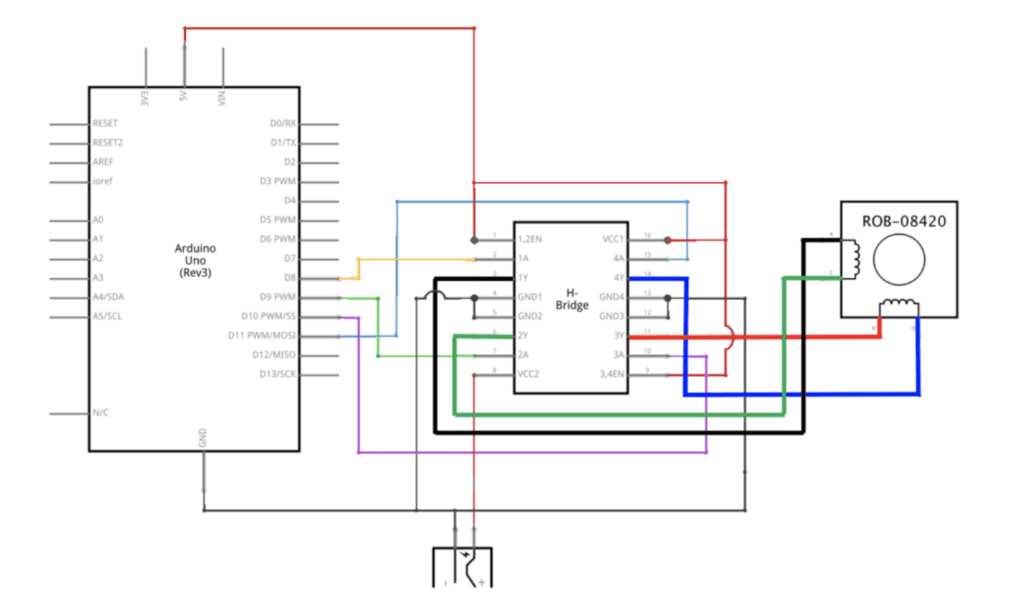
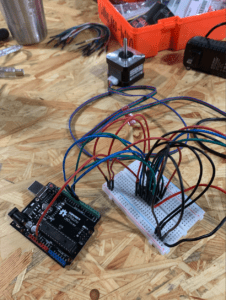
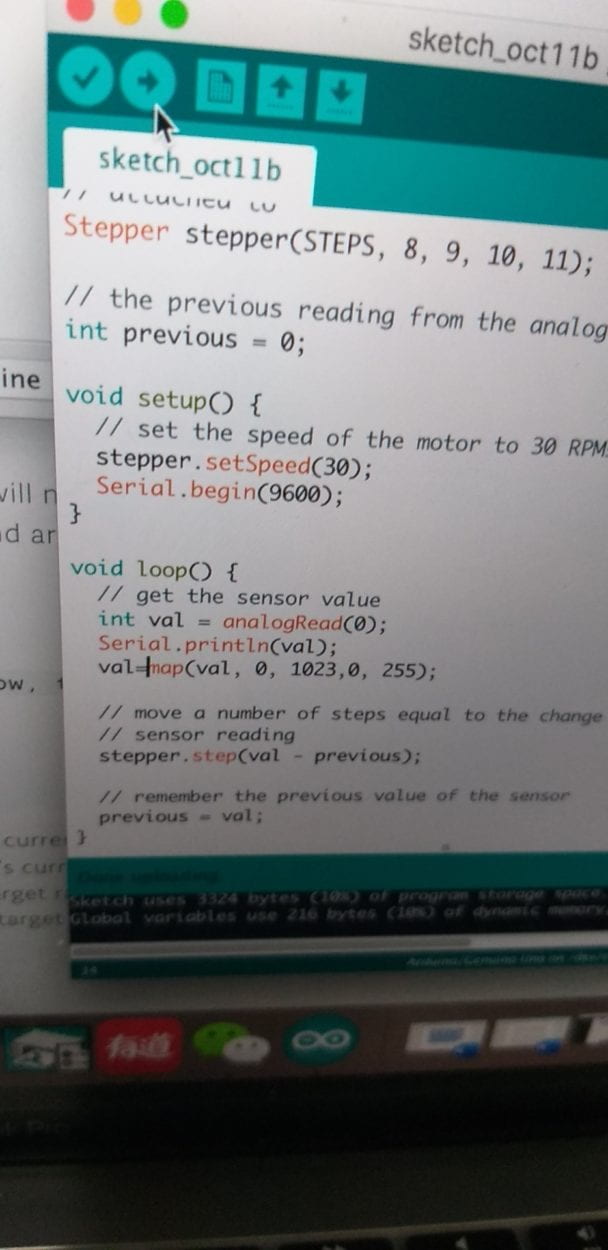
the thing to notice is that the side with the semicircle is the top side of the H-bridge. Step one is easier but for step two, I encountered some problems. The first one is where to put the potentiometer and how to connect it. later I figured out for the side only have one pin, it should go to the ground on the ardurino board. For the side that has two pins, one should go to the positive side on the bread broad and one should go to the ground on the broad. The second problem is the potentiometer cannot correctly control the movement of the motor. So I opened up the serial monitor to check wether the potentiometer works. It turned out that it’s the feedback delayed. Whenever I turned it, the value would change after ten seconds. So I added a map function. And it worked well.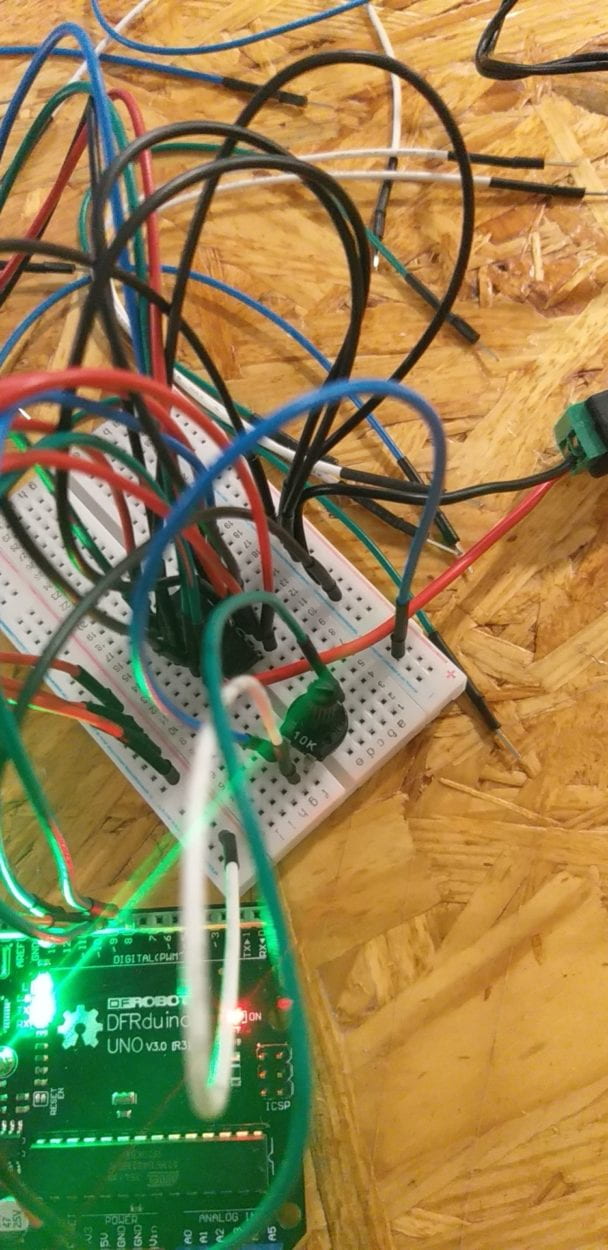
For step 3:
2 * Laser-cut short arms
2 * Laser-cut long arms
1* Laser-cut motor holder
2 * 3D printed motor coupling
5 * Paper Fasteners
1 * Pen that fits the laser-cut mechanisms
Q1:What kind of machines would you be interested in building?
The drawing machine is very fun. I am thinking about building a larger scale drawing machine that can paint grafitti on the wall with multiple colors. Digital manipulation of art is very interesting because we used to separate “art” and “digital” , one is human and one is machine. The combination of the two which is the digital manipulation of art brings up many interesting features of the artwork.
Q2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
The robot drum player seems very appealing to me. I have seen performance of my favorite singer cooperate with the robot player and conducted the show. Again is the human-machine contrast make this show interesting. This drum playing robots is different and similar to our drawing machine. The differences are first, they are robot shaped, second, they are playing drums. The similarities is both the drawing machine and the robots are to let machine to do something humans do, and the drawing machine can also be made in the shape of robot arms. The artist use different motor to achieve the move of the robot arm and fingers, to make the motion elegant, just like the human movement.