Artificial Muscle Based on Electroactive Polymers:
A New Foundation for Bio-inspired Robotics
Gengyu Chen and Yile Xu
Department of Interactive Media Arts, New York University Shanghai, Shanghai, China
(Tel : +86-131-670-51591; E-mail: gc2370@nyu.edu)
(Tel : +86-186-658-00487; E-mail: xy1242@nyu.edu)
Abstract: To break the limitations and barriers of tradition locomotion design in robotics, this paper focused on a new material: Ionic Polymer-Metal Composites (IPMCs), which is a subset of Electroactive Polymers (EAPs). This kind of material can conduct movements such as shrink and stretch under a low voltage. It can function as artificial muscles for a new foundation of robotics design. The paper explored easy producing procedures from Nafion 177 to IPMCs and the following procedures from IPMCs to the artificial muscle, along with some theoretical knowledge about EAPs and IPMCs. Then the paper presented qualitative testing data for the material and possible further application of using this kind of artificial muscle in bio-inspired robotics.
Keywords: IPMCs, EAPs, Artificial Muscle, Bio-Inspired Robotics.
-
INTRODUCTION
The mainstream for robots’ locomotion design is to use motors, servos, and other metallic compartments. Although they seem to function well, they are different from real animal movements. Thus, they have certain limitations and drawbacks. Therefore, Researchers have been trying to design new locomotion systems for robots, but there are only a few results.
This paper provides a foundation for a new locomotion system design, by studying a widely-ignored material: Electroactive polymers (EAPs), especially on one of its type: Ionic Polymer-Metal Composites (IPMCs). This type of material will shrink when providing low voltages onto its surface, and stretch when removing the voltages.
EAP material was firstly invented by a material scientist named Wilhelm Rontgen.[1] Then in the 1960s, a breakthrough of EAPs took place, and the first electrically conducting polymers were discovered by Hideki Shirakawa.[2] In the early 1990s, IPMCs were developed and appeared to be much more effective compared to EAPs.[3] It needs only 1 or 2 volts to motivate, and this became a significant discovery for the bio-inspired robotics’ development.
However, the artificial muscle made of IPMCs is still hard to be manufactured, and the quality of the material is still beyond control. Thus, base on previous research done by other scientists, The paper discovers a simple procedure for university students to produce their own artificial muscle from EAPs, and find ways to apply this new kind of artificial muscle to the bio-inspired robotics.
-
Electroactive Polymers and Ionic Polymer-Metal Composites
EAP materials have two categories, Dielectric Electroactive Polymers (DEAP), whose squeezing and stretching behavior is caused by electrostatic forces on the surfaces. The force stretches and squeezes the insulated polymers in the middle. This type of material is resilient and relatively easy to manufacture. However, it requires thousands of volts to function. The other type is Ionic Electroactive Polymers (IEAP), which is represented by IPMCs. The material is made up of a cation or anion exchange polymer with its two sides plated by metals. When being added voltages, the surfaces creates an electric field in the polymer, moving the corresponding ion to one side. However, the detailed theory behind its behavior is not fully understood.
-
Experiment Design
3.1 Material Preparation
Equipment: Beaker, Glass Rod, Dropper, Test Tube, Forceps, Water Bath, pH test paper.
Reagents: 10cm x 10 cm Nafion-117 Polymer, Platinum standard solution, diluted hydrochloric acid, 1% ammonium hydroxide solution, 10% NaBH4
3.2 EAPs Manufacturing
- Cut Nafion-117 into 2 x 1cm x 5cm, 2 x 2cm x 5cm, 2x 1cm x 10cm, 1 x 2cm x 10cm.
- Roughen the surface of Nafion-117 polymer by sandpapering.
- Mix Pt solution with ammonium hydroxide until pH is 3.
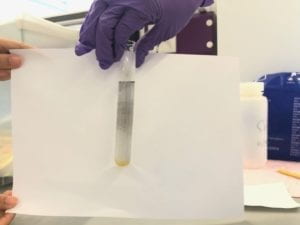
- Place the one cut of the polymer in the stirring Pt solution at 80◦C for 5 minutes.
- Move the polymer to NaBH4 solution at 50◦C, and observed bubbles emerge on the polymer. Wait for the reaction to be over.
- Repeat process 4-5
- When dense grey metallic layers form on the membrane surface, finish the experiment.
3.3 Performance Testing
Dry Test:
Using ATTEN TPR3003T’s Regular DC Power Supply and two pieces of conductive tape on both sides of the IPMCs polymer.
Modify the voltage from 0V to 30V to activate the polymer. Then modify the current from 0.1A to 10A to supply different intensity electric field level with the combination of various voltage.
Underwater Test:
Using ATTEN TPR3003T’s Regular DC Power Supply and two pieces of wire with an insulating layer on the side surface touching both sides of the IPMCs polymer.
Modify the voltage from 0V to 30V to activate the polymer. Then modify the current from 0.1A to 3A to supply different intensity electric field level with the combination of various voltage.
-
Experiment Process Record
Lab Record:
Final Project’s Documentation (Artificial Muscle Based on Electroactive Polymers: A New Foundation for Bio-inspired Robotics)
Link to the Record:
https://wp.nyu.edu/shanghai-ima-documentation/uncategorized/xy1242/lab-report-final-project-artificial-muscle-documentation-draft/
-
Experiment Results Analysis
First Experiment Result: Failed
Reasons’ Analytic Report:
- The previous stirring time is not enough for Pt ions to attach on the surface of the polymer.
- The NaBH4 solution was mixed with the Pt solution, which caused waste of the Pt ions in solution.
- The concentration of the ammonium hydroxide solution is too high and caused the high pH level of the solution. Finally, it results in the precipitation of Pt.
Second Experiment Result: Half Success
Reasons’ Analytic Report:
- The oxygen in the open air oxidized the Pt that was successfully attached to the polymer.
- The Pt on the polymer is still not enough after a single round of the experiment. The above procedures need to be repeated 3-5 times to ensure the efficiency of the polymer.
Third Experiment Result: Half Success
Reasons’ Analytic Report:
- Tried to use a higher concentration of NaBH4 solution. However, it turned out to be too much. The Pt that had already attached on the surface in previous steps drop down because of the fierce bubbles caused by the reaction.
- The time is so limited that the reaction is not fully completed.
Fourth Experiment Result: Success
Reasons’ Analytic Report:
- Cut the edge of the polymer in order to avoid the electricity to go through the edge to another surface.
- Substituted the NaBH4 by the N2H4·H2SO4. This change narrowed down the cost of manufacture.
-
Further Development
6.1 Heart, Lung, and Jellyfish:
Heart, lung, and the propulsion locomotion of jellyfish are similar: the muscle expands, creating a negative pressure to draw in blood, air, or water, then the muscle contracts to push them out. They can be implemented by our material.
Using the IPMCs based artificial muscle as the jellyfish’s muscle underwater is feasible. The Microbit and related editor like mu-editor can be used to do the physical computing part and provide periodical voltage. The basic movement like moving forward and blood cycle can be achieved by applying different intensity of the electric field.
6.2 Arms, Legs, and Bio-Inspired Seahorse Robotic:
The Seahorse Robotic might be the best robotic to utilize the feature of IPMCs based artificial muscle thoroughly. By using the IPMCs with less Pt density to build the top half part of the seahorse robotic and use the more Pt density one to build the bottom half. The IPMCs’ feature of having a different shrinking and stretching level under different Pt density and electric field intensity. It is similar with robotic arms and legs, where the IPMCs connects with to bones, which are assembled by a joint.
References
[1] Keplinger, Christoph; Kaltenbrunner, Martin; Arnold,
Nikita; Bauer, Siegfried (2010-03-09).
“Röntgen’s electrode-free elastomer actuators without electromechanical pull-in instability”. Proceedings of the National Academy of Sciences. 107 (10): 4505–4510. doi:10.1073/pnas.0913461107. ISSN 0027-8424. PMC 2825178. PMID 20173097.
[2] “Electrochemistry Encyclopedia: Electroactive
Polymers (EAP)”. Archived from the original on 2012-12-12.
[3] Finkenstadt, Victoria L. (2005). “Natural
polysaccharides as electroactive polymers”. Appl Microbiol Biotechnol. 67 (6): 735–745. doi:10.1007/s00253-005-1931-4. PMID 15724215.