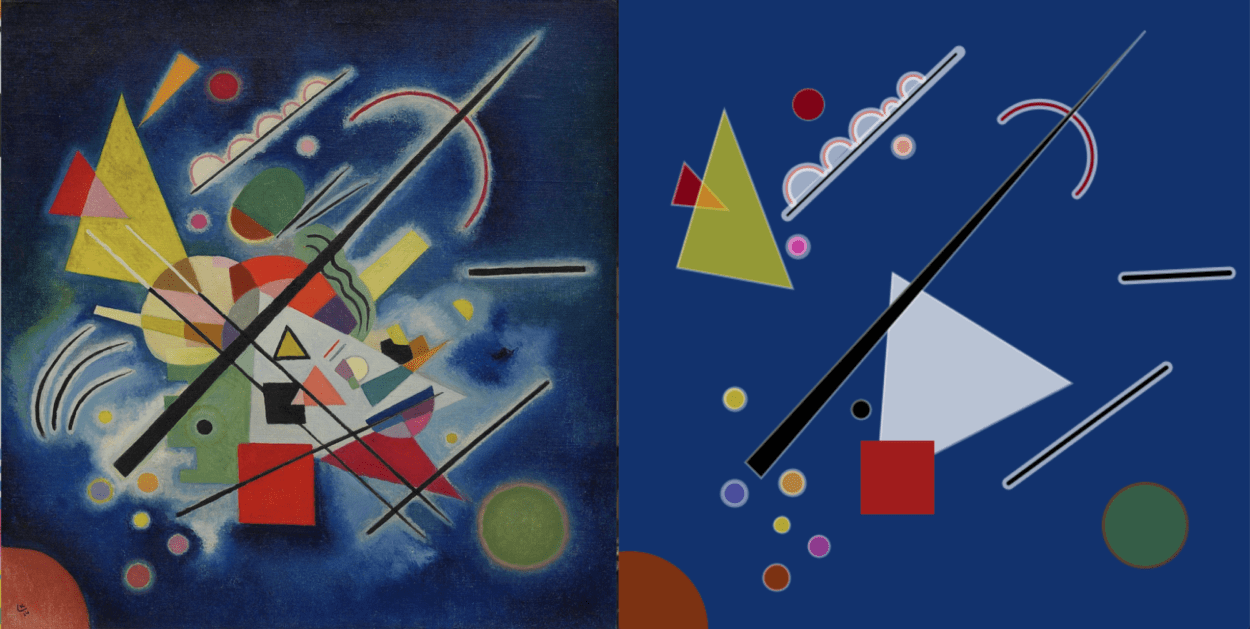
The reason I chose this image is that it looks so impressive (it seems that there are tension and power contained inside) but is merely composed of basic shapes: triangles, rectangles, ellipses, arcs, and lines, etc. I was stroke by it by first glance. I wanted to facsimile the same image by Processing. The result looks similar, but still lacking many elements. It is an abstract, a brief summary of the image. I don’t think drawing is a good means because the setting of coordinates costs a lot of time. Meanwhile, the watercolor-like background isn’t easy to be implemented in Processing, leaving out its original appeal.
code:
size(600,600);
background(18,50,109);
strokeWeight(8);
stroke(255,150);
noFill();
arc(180,180,40,40,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(210,150,30,30,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(240,125,35,35,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(260,105,15,15,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(280,85,25,25,PI-PI/4,TWO_PI-PI/4,OPEN);
strokeWeight(2);
stroke(206,115,113);
fill(255,150);
arc(180,180,40,40,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(210,150,30,30,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(240,125,35,35,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(260,105,15,15,PI-PI/4,TWO_PI-PI/4,OPEN);
arc(280,85,25,25,PI-PI/4,TWO_PI-PI/4,OPEN);
stroke(255,150);
noFill();
strokeWeight(10);
arc(400,150,100,100,PI+PI/4,TWO_PI+PI/4,OPEN);
stroke(127,3,22);
noFill();
strokeWeight(3);
arc(400,150,100,100,PI+PI/4,TWO_PI+PI/4,OPEN);
strokeWeight(12);
stroke(255,150);
line(160,205,323,50);
line(370,460,520,350);
line(480,265,580,260);
strokeWeight(2);
stroke(0);
line(160,205,320,52);
strokeWeight(4);
line(370,460,520,350);
strokeWeight(5);
line(480,265,580,260);
stroke(255,100);
strokeWeight(1);
fill(127,3,22);
ellipse(180,100,30,30);
strokeWeight(6);
fill(232,157,125,230);
ellipse(270,140,18,18);
fill(193,58,153);
ellipse(170,235,18,18);
strokeWeight(4);
fill(239,224,16,180);
ellipse(110,380,20,20);
strokeWeight(2);
fill(0);
ellipse(230,390,18,18);
strokeWeight(4);
fill(224,152,51,200);
ellipse(165,460,23,23);
fill(119,98,193,140);
ellipse(110,470,23,23);
strokeWeight(2);
fill(239,224,16,180);
ellipse(155,500,15,15);
fill(193,58,153,180);
ellipse(190,520,20,20);
fill(124,50,18);
ellipse(150,550,25,25);
fill(127,3,22);
triangle(62,155,50,195,103,200);
fill(239,224,16,150);
triangle(100,105,55,255,165,275);
fill(255,180);
triangle(260,260,430,365,245,460);
fill(0);
triangle(500,30,120,440,135,455);
noStroke();
fill(124,50,18);
ellipse(10,600,150,150);
strokeWeight(3);
stroke(124,50,18,150);
fill(107,160,14,100);
ellipse(500,500,80,80);
noStroke();
fill(160,28,28);
rect(230,420,70,70);
Citation:
The original image comes from https://www.guggenheim.org/artwork/movement/Bauhaus. The author is Vasily Kandinsky. The image is called Blue Painting.