What should people do when they face an unclear future with hesitation? This was the initial inspiration when I heard the group project’s topic. After reading external reading materials and articles, also going through those creative websites, I formed my definition of interaction, which is a procedure of two or more objects affecting each other in various ways in a short period of time. If we split that procedure into closer details in a simple way, it is like what Igoe and O’Sullivan define in Introduction to Physical Computing—interaction is “listening, thinking, and speaking” in human terms from Chris Crawford’s perspective and “input, processing, and output” in computer terms (XX). However, an interactive device must be able to change its output as long as the audience changes its alterable input, while the algorithm is fixed. This definition is enhanced by our group project of the 2119 interactive device and the two projects—Blackberry Winter and BIY™—I found on the Creative Application. When I researched on the interactive devices, I found BIY™(Believe it Yourself), created by Shanghai-based design studio Automato.farm, which are three different kinds of real-fictional belief-based computing kits. The kits will respond to the user based on traditional Chinese Geomancy and Fengshui, which is based on rules of positions of mountains and rivers nearby and tell the fortune. Will we be more confident if we know some hints of the future? Will we be more willing to deal with obstacles if we have some advice? The book of answers is a book to give suggestions to hesitating questions. By placing your hand on the top of the book, ask the question in your heart, and open the book, you can find some instructions from the book. However, the users actually know that the book is based on nothing. This then becomes less interactive and convincing. So we decided to make a device, using sound sensors to analyze the audio and open a box with an answer on it, which seems more convincing and scientific. By this method, the user may have some new inspiration and unexpected reflection on their questions.
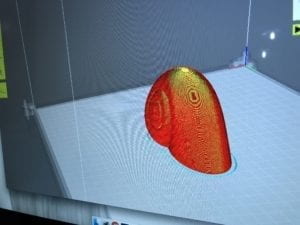
To make this idea become reality, we first draw the drafts of the device. We want to let the audience ask the question aloud, as well as the answer can automatically show up in front of them. So we designed a microphone-look sound sensor to get the audio data with a button that controls the start and the end of receiving the audio information. Meanwhile, the sensor is connected to a few boxes, which can be opened by servo from inside, with the answer on the inner side of the cover. However, Leon wants to use the meme from the Sponge Bob. Thus we changed the shape of the microphone into a conch shell, which refers to the repeated question in the Sponge Bob: “why not ask the magic conch?” The conch shell is 3D printed in a pure white color, and we use the wood board to laser cut those boxes. However, we found it was hard to open the box from inside by servo. And it also fails by using the stepper to rotate a rope, which linking to the box cover to open the box. We then change to use LED light to suggest which box the user should open after asking the question.

But during the user testing session, we found that most people would treat the conch as a speaker instead of a microphone. Meanwhile, we needed to open the box for them since many of the users didn’t know how to treat those boxes even if the light was on. The instruction given by the LED was not clear enough to let the audience understand what to do, as well as the shape of the conch was kind of misleading. So we finally changed the conch back into the shape of an old microphone and put servos on the side of the boxes to open the covers.
Elements and materials we eventually use:
(1) Breadboard *1
(2) Arduino UNO *1
(3) Servo 180 *5
(4) M/F, F/F wires *n
(5) Laser-cut boxes *5
(6) Laser-cut Microphone *1
(7) Huge base cardboard *1
(8) Infrared-ray Distant Sensor *1
(9) Sound Sensor *1



During the user testing session, lots of people did not know how to use it at first, only when we gave the instruction would they feel interesting. However, it was clear that the implication of using methods is not obvious enough for users to interact with it. We implement the advice to replace the button with a distance sensor, change the look of the microphone, and also let the boxes open by itself. These suggestions are all given by the users during the user testing session, which makes a great improvement to let the user better interact with our device. First, we used to let the button become a controller of the whole circuit, which means the user needs to keep holding the button while they are asking the question. As we replace the button with an infrared ray sensor, it will automatically start and stop while it detects the distance is close enough (inside of a range). Second, the shape of the conch is somehow misleading. The user may won’t connect it with the Magic Conch in the Sponge Bob, or even didn’t see the Sponge Bob before. But the look of the old microphone itself has a strong implication for the user that here is the place to talk and ask the question. The infrared ray sensor is stuck on the microphone to detect the distance and also look better. Third, we add the servo on the side of the box to let the cover open automatically instead of letting the user open it. We also add one more box into the device, which contains a few chocolates in the “enjoy it” box. The aim of us is to let the user has some reflections after receiving this answer. It may be unexpected and reveal a new way for them to deal with the trouble, or it may be what they thought before, and confirm their confidence.
We had lots of troubles when we were working on this project besides the unclear implication of the look of the device. Since we had five boxes, we need surplus power to run those servos. However, we burnt one because we didn’t know the servo was driven by 5V power. Later, we found that the Arduino board is not powerful enough to drive one servo and two sensors. This problem was not identified during the presentation session so that we could only act by ourselves. Meanwhile, the connection between the cover, the box, and the servo is not delicate and strong enough.
Linking back to my own definition of interaction: a procedure of two or more objects affecting each other in various ways in a short period of time. I let the box with certain answer open after I asked the question, as well as the answer is given by the box makes me reflect on my decision and my question itself. In the user testing session, the user also asked some questions they really care about and was surprised by the answer given. The device itself is not only cool but also reflective. However, because of our failure in circuits, the experience of the user is not as perfect as I expected before. This also teaches me a lesson that I should test the circuit much earlier than the deadline so that we can find out whether there are any potential problems. Because in our expectation we didn’t suppose the Arduino kit cannot drive a servo and both sensors, we built up outside fabrication part and then the circuit, which was really late, just before the presentation session. If we do have more time, we will improve it by adding more answers (boxes), let the connection between the box and the cover more stable, and also let more people try the device and provide feedback.
However, the device was finally working on Friday, after fix and repair. I was astonished by the answer “enjoy it” when I asked my question “what is my launch today?” I suddenly remembered our initial motivation for making this device: to inspirit the user to find a way of solving their problems. So I went downstairs to grab a grilled cheese, one of my favorite food, as my launch that day.
It gave me inspiration and some suggestions for my future decision. Though whether to follow its suggestion or not is my own decision, we can not deny the huge possibilities of people being inspired by the device. The reflection of our answers, decisions, and also questions may also influence our behavior. However, I also hope that people can be joyful when they receive the unexpected answer, eat that chocolate, and live their lives happily without hesitating for their decisions.
References:
Crawford, Chris. “Art of Interactive Design.” Art of Interactive Design | No Starch Press, nostarch.com/interactive.htm.
https://books.google.com.hk/books/about/The_Book_of_Answers.html?id=xHlN3wrJfEsC&source=kp_book_description&redir_esc=y
The code is attached as following:
#include <Servo.h>
Servo myservo;
int VIPin = A0;
int DIPin = A1;
int DisThreshold = 80;
int V_upper_bound = 127;
int PinOut[] = {3,5,6,9,10};
void setup() {
Serial.begin(9600);
}
void loop() {
//Generate a box number according to the audio received.
int DisInput = analogRead(DIPin);
int BoxNumber = 0;
int Tri = 0;
if (DisInput >= DisThreshold) {
Tri = 1;
}else{
Tri = 0;
}
while (DisInput >= DisThreshold) {
int VoiceInput = analogRead(VIPin) % 5;
BoxNumber += VoiceInput;
DisInput = analogRead(DIPin);
delay(10);
}
if (Tri > 0) {
BoxNumber = BoxNumber % 5;
myservo.attach(PinOut[BoxNumber]);
Serial.println(PinOut[BoxNumber]);
delay(3000);
myservo.write(120);
delay(7000);
myservo.write(0);
}else{
myservo.attach(3);
myservo.write(0);
myservo.attach(5);
myservo.write(0);
myservo.attach(6);
myservo.write(0);
myservo.attach(9);
myservo.write(0);
myservo.attach(10);
myservo.write(0);
}
delay(1000);
}

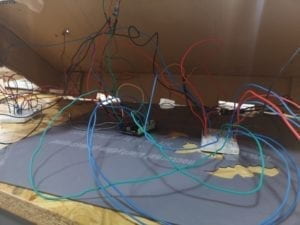
 This is the circuit with complex wires.
This is the circuit with complex wires.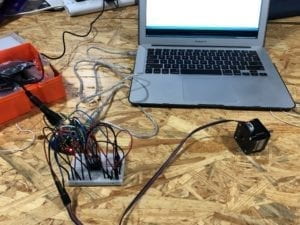


 Believe it Yourself.
Believe it Yourself. Blackberry Winter.
Blackberry Winter. Our Group Project
Our Group Project
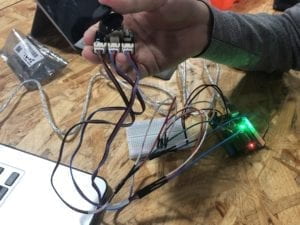


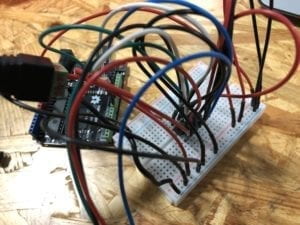
 This was the circuit we made.
This was the circuit we made.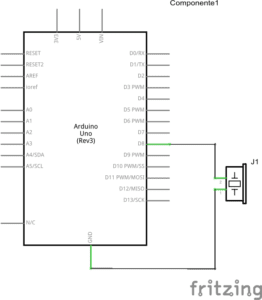
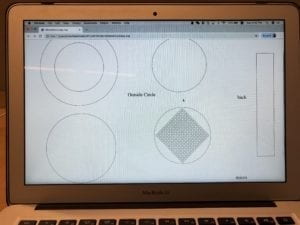
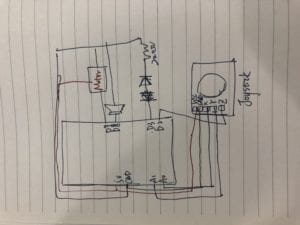
 This is the diagram on the Tinkercad.
This is the diagram on the Tinkercad.




 These were the codes.
These were the codes.
 These were the circuits we made.
These were the circuits we made.