Introduction:
In the lab with Professor Danyang, we aimed to observe the difference of the circadian rhythms between regular drosophila and mutated drosophila. We are expected to see a clear circadian rhythm on regular drosophila while no such rhythm is observed on drosophila with genetic mutation.
Procedure:
1. We got two different types of drosophila in two culture vials. Regular ones are in the pink label vial and mutated ones are in yellow label vial (if I remember that correct). First we need to use CO2 anesthetizer to temporally immobilize flies.

Once drosophila is immobilized, it will fall to the bottom of the vial.
2. Open vials and pour all drosophila on the Flowbuddy CO2 system to keep them all anesthetic. Then we need to pick male drosophila out, put each of them individually into a fly behavior monitor vial and label the vials. The reason why we do this is that drosophila has a very short life cycle so that female drosophila may lay eggs in the vial, thus affecting the accuracy of the experiment. Thus, we will only use male drosophila in the whole experiment.


Seal one end with food and the other end with cotton, so that we can keep the drosophila alive with enough food and oxygen. Vials with yellow label are regular ones. Vials with red label are mutated ones. 8 of each and 16 in total.
3. Put all the vials on the monitor and put the monitor in a total dark environment. In this way, we can see that, if the regular drosophila does have a circadian rhythms, their locomotion will show a pattern in each 24 hours even when they cannot tell the day or night. The monitor will record how many times they fly across the middle of the vial every hour.



Data Analysis:
After I got the data from Professor Danyang, I figure out that the experiment I conducts almost failed. Among all 16 samples, only 5 survived from the process above. 4 of them are regular drosophila and only 1 of them is mutated drosophila. Unfortunately, 2 of the 5 drosophila lost readings in the half of the 8-day process. All of the rest 3 drosophila are regular drosophila. The sample is too small, which means I can barely get anything useful from it. But anyway I deal with the data of these 5 drosophila and see if there is anything I can get.
From 16:00 on 14 April, I turn every 24 hours in to a day with only 22 hours on the last day. The x axis is the point of time and y axis is the how many times they fly across the middle of the vial. In this way, I turn the data of each drosophila into a line chart.
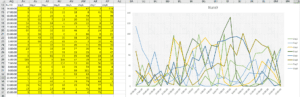
Regular drosophila number 9. Survive all 8 days. However, the drosophila shows no circadian rhythms at all on these 8 days.
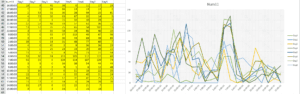
Regular drosophila number 11. Survive all 8 days. Show a rather clear circadian rhythm. It was extremely active during the period of 6:00-8:00 of everyday and relatively inactive from 3:00-5:00 and 9:00-16:00 of everyday. In period of 17:00-2:00, it status was quiet fluctuated. 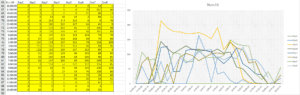
Regular drosophila number 16. Survive all 8 days. I would argue it has a clear circadian rhythm. During the period of 20:00-11:00, it was active. In the rest of the day, it was inactive.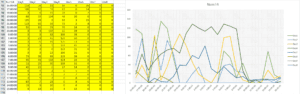
Regular drosophila number 14. Died in day 6. It has a similar circadian rhythm as the number 16 and the frequency is as high as number 16 until one day before it dies.
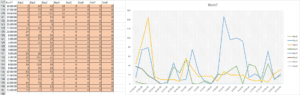
Mutated drosophila number 7. Died in day 4. I don’t see clear circadian from it. The data size is too small.
Conclusion:
To conclude on the experiment, from this limited-sized sample, I would argue that circadian rhythms does existed on regular drosophila, even the sample size is really too small, and I will not make any conclusion on mutated drosophila since I got nothing about it from the experiment.
However, from the process, I can imagine the how difficult the scientific community approaches these results. To prove the conclusion of the experiment, scientists need to conduct a much large sample size experiment and it mush be extremely time-consuming. Moreover, raising the idea is much harder than doing the experiment. The complete experiment we are doing nowadays may be based on a process of repeated corrections. Similarly developing robot and software cannot be trouble-free. However, we will finally achieve what we want if we keep going.