Through this guide we will assemble and program a robot that moves around.
The objective of this lab is to get comfortable with the different mechanical parts involved in a robotics project and get started in planning a trajectory and programming it.
I. Kittenbot Assembly

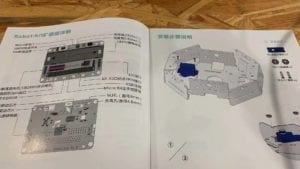


At the outset, I looked at the instruction manual and immediately felt intimidated due to the fact that it is only displayed in Chinese. However, upon further examination I learned that it was a visual manual, so the steps for assembly were pretty intuitive.
I partnered with Terrence to assemble together in case we ran into any issues.
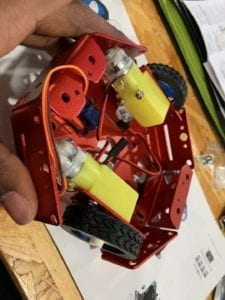
There were, however, several points at which I encountered malfunctions. For example: the included screws are quite cheap and thus are easy to strip with the screwdriver. I ended up stripping a screw or two and had to fix it by hand. The same occured with the plastic screws, which were of even more meager quality.
Other than that, the assembly process was pretty simple and straightforward.
II. Programming
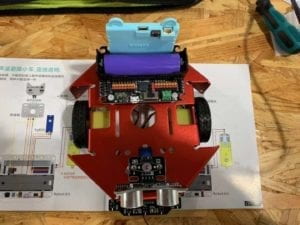
Terrence and I used the Ultrasonic Sensor and Servo to code a program which detects obstacles and avoids them. Once it sees something in its way, the robot should turn around and head 90 degrees in the other direction. When there is no obstacles, a green light shows. Once the Kittenbot detects an obstacle, the light turns red before stopping and turning around.