By: Gabrielle Branche
Introduction:
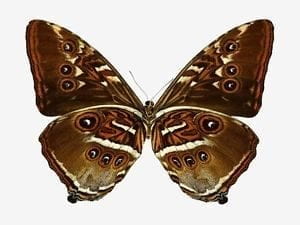
For my midterm project I looked at the behavioral characteristics of a moth. The final result was a robot that could move around, deposit ‘eggs’ (represented through neon lights) and fertilize and specific mating sites. In the second half of the semester we have spent a great deal of time working on locomotion and looking more closely on the mechanics of movement. This got me thinking into the design of my moth. As such I want to use my final project to perfect my moth both in a behavioral point of view and also implement locomotive characteristics.
The moth was supposed to stay in the confines of it’s ‘hive’ (see midterm documentation) but did not work with the other code. This would be the first aspect of my moth that I would like to work such that in alignment with the giant [insert name of moth here… the moth would holistically behave accurately.
After that I would like to design wings that can flap similar to that of a moth that can be attacked to the kitten bot. Of course, determining the aerodynamics to actually make the robot fly would be beyond the scope of this course. However, I believe that it is within my capacity to make wings that flap and pause depending on when the bot is moving or not.
Observation:
My first step was to find videos that could show me exactly how the moth wings work. The best two videos which show their movement in slow motion are as shown below:
From observing these videos, I realized that moths have a very even up and down movement almost as if both wings are controlled by a single axis. This would be important to take into consideration when creating my own wings
Research:
After researching the aerodynamics of moths, I learnt that the wings need to have some level of flexibility to allow for a fluid movement of flapping (Smith, 1996 ). Additionally, in a study of Hawkmoth flight, it was indicated that the angle of rotation of the wings were not constant and changes with speed and flight distance (Willmont and Ellington 1997). Finally, my suspicions about the consistency of both sides of wings were also confirmed in this study which should that both sides were coupled very evenly (Willmont and Ellington, 1997).
Modelling:
To model these wings, I will use the skills we learnt about prototyping to create different versions. My first version will most likely use cardboard to fully understand the flapping mechanism. I hope to move from this point to a 3D printer version that will allow for a more flexible material which would satisfy the aerodynamic needs.
I found a video that I can use to model the wings that use simple servo mechanics on a single axis to simulate flapping.
Timeline and challenges:
I have currently done the research needed to implement this project. The next step would be to start he design. My hope is to have my first prototype by Tuesday’s class which I can then perfect for Thursday’s class giving me the weekend to make the final result and focus on the paper.
The biggest challenge for this project would be the coding as I am still not the strongest coder. However, I believe that with the use of the video showing how the wings were made and with good timing for improvement I can get this project fully put together
Benefit and Importance:
This project will improve my understanding of code and mechanics. Moreover, I believe that the beauty of robots are the fact that like biological systems they exist with a level of robustness that leaves room for adaptability. My hope is that by choosing to continue with the moth I can finish the semester with a complete robot that can stand on its own and that I am proud of.
References:
Gopalakrishnan, Pradeep, and Danesh K. Tafti. “Effect Of Wing Flexibility On Lift And Thrust Production In Flapping Flight”. AIAA Journal, vol 48, no. 5, 2010, pp. 865-877. American Institute Of Aeronautics And Astronautics (AIAA), doi:10.2514/1.39957.
Smith, Michael J. C. “Simulating Moth Wing Aerodynamics – Towards The Development Of Flapping-Wing Technology”. AIAA Journal, vol 34, no. 7, 1996, pp. 1348-1355. American Institute Of Aeronautics And Astronautics (AIAA), doi:10.2514/3.13239. Accessed 5 May 2019.
WILLMOTT, ALEXANDER P., and CHARLES P. ELLINGTON. “THE MECHANICS OF FLIGHT IN THE HAWKMOTH MANDUCA SEXTA”. The Journal Of Experimental Biology, vol 200, 1997, pp. 2705–2722., Accessed 5 May 2019.