This lab we observed the biological rhythm of regular drosophila and drosophila with genetical mutation. We separated female drosophila for more accuracy. Then each group put the mutational drosophila in 8 tubes and the regular ones in another 8 as comparison. We sealed the tubes and put them in a monitor to observe whether they would fly across the middle of the tube for a day.
Analyzation on Experiment Result
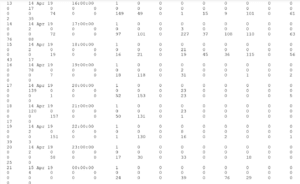
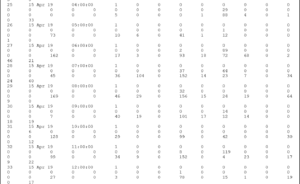
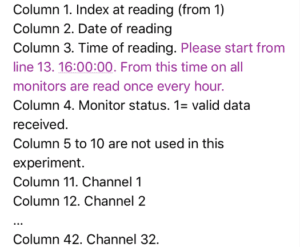
A part of the result table is shown below:
Explanation of the Result Table
(from Rudi)
From the result we can see a clear periodical behavior for normal drosophila: they move in the day and rest at night. The genetically modified ones shows some lack of biological clock, although not completely. Some were active during the night and quiet during the day.
It shows the cry gene affects the biological rhythm of drosophila. There are also some drosophila that hardly moves in both genetic modified group and normal group, it is probably because they were dead.
Reflection on the Process
The experiment shows that unlike subjects that requires mathematical calculation, biology mainly assume a possible conclusion based on observation in nature or experience (for this experiment, that cry gene affect the biological rhythm of drosophila), than design experiment. In this experiment, in order to study the biological rhythm of drosophila and how a certain gene (cry) affect it, the experiment separate the variable we want to know (contain the cry gene or not), design two groups (test and comparison) and control the rest variable to be the same.
Connection to Bio-robotics
Since in current level we do not have too expert theoretical knowledge in math, electric engineering, circuit and so on, when making robots we also need more assumption and test then mathematical calculation, and sometimes it is easier.
In the prototyping project, we assumed several possible solution to make legs for our robot, then we use cardboard to do experiments and find the best approach. But we sometimes add to many variables in a single test, for example, we change the body of our robot and the way of connecting the leg parts at the same time.
In the midterm project, we actually made an assumption of a certain probability distribution to calibrate the compass, then after experiment and some modification in arguments it did work.
It shows that the way of biology study and research could also be applied into robotics, and that mathematic calculation is not always the best solution. Sometimes we need to “go back to the nature”, make guesses and just test them.
We decided to create a brand new robot totally different from our midterm one: a jellyfish in the air.
From this video we found that actually jellyfish moves by propelling water out its body, instead of commonly thought by moving those tentacles.
We felt that it may sound more fascinating to make a jellyfish in the air, so we can let it float around us and follow us where ever we go.
The project contains 5 parts:
1. structure
We decided to make jellyfish-like double-layer membrane filled with helium to make it able to maintain its position in the sky without falling down. (It is mainly to save power, else the propulsion part will have to keep running)
2. control
We decided to use microbit with robotbit as before. In addition, we need a voltage transformer this time to support our propulsion part.
3. movement
The most exciting case, also the most difficult one, is that we will design, test and make a special Electroactive Polymers (EAPs). It is a material that will shrink sharply when receiving electrical current or field. So, it can act as artificial muscle to simulate in inhalation and exhalation (propulsion) of jellyfish.
After researching, we discovered a way to make it: using PDMS membrane and Graphene.
However, as EAPs material is an advanced material science, there are chances that the result might be not as we expected. So I prepared a backup plan: just using helicopter fans to propel it.
4. power
Currently we have 3 options:
a. use battery (most simple, but might be heavy and not good looking for the jellyfish)
b. wireless power (requires some extra knowledges technologies and experiments)
c. solar power board (expensive)
5. detailed modification
Mainly decoration, testing, programming and changing argument in software.
Sources:
Yoseph Bar-Cohen. ELECTROACTIVE POLYMERS AS ARTIFICIAL MUSCLES – CAPABILITIES, POTENTIALS AND CHALLENGE. JPL/Caltech. 4800 Oak Grove Drive, Pasadena. CA 91 109-8099 Phone 8 18-354-2610. web: https://trs.jpl.nasa.gov/bitstream/handle/2014/18826/99-2121.pdf?sequence=1
Adelyne Fannir et al. Linear Artificial Muscle Based on Ionic Electroactive Polymer: A Rational Design for Open‐Air and Vacuum Actuation. https://onlinelibrary.wiley.com/doi/full/10.1002/admt.201800519
Steven Ashley. Artificial Muscles. Scientific American. October 1, 2003. https://www.scientificamerican.com/article/artificial-muscles/
IAD ZHdK, Electroactive Polymers Part 1: Shower Hose Stretching Mechanism Video Tutorial, Zurich University of the Arts (ZHdK), Interaction Design Program,
All Five Oceans, How do Jellyfish Move ?, https://www.youtube.com/watch?v=qlgGsjw3LREs
The three-class prototyping project requires us to get rid of the wheels on our robot cat and implement a locomotion behavior like a real animal.
At first the jumping behavior in the video shown by professor intrigued us and we intended to implement that. But soon we found we were short of materials.
I expected this material could be used as a leg for jumping because it seemed elastic and indeed when I bent it, it would restore to the original shape. However soon I found it could not even support the body (chips battery etc.). The body would slide backward and fell down.
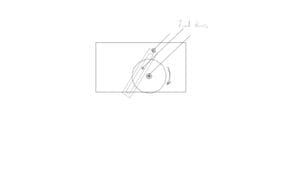
Then we decided to change another focus. After researching online Jacky found a video on YouTube that tells the mechanism to change the rotating motion of a motor to a swinging motion of a stick to simulate legs. And we decided to focus on it.
When the motor rotates, the stick will be in a swinging motion.
We fist drew a graph (shown above) to better understand the principle behind it, then we tested it on cardboards. It worked really well.
Then we laser cut those components out to assemble real legs. By then we knew that there is a long way from succeeding in lab experiment to implement the result into real world. We faced huge amount of problems that were beyond our expectation from the beginning: The laser cut machine didn’t work; the first models were so narrow and thin that they broke; the holes for screws were zero point some millimeter smaller and the screws could not pass through; the spinning motion got stuck by the screws …
The motor got stuck by a screw.
We had to solve them one by one, for hours. We rebooted the machine several times (and the order of operations really matters!); we measured and redesigned the scales of those parts for several times on Illustrator; we used drills to make the holes wider but then they became too wide that we had to use some material to fill in them… Finally we made it!
The first version.
We could have stopped there. But as the body was made by cardboard, we decided to laser cut a prettier body for our robot. When we made that decision, we had never realized it would cause us the greatest trouble ever in this project.
The robot kept felling over when it moved; the motors were more easily to get stuck; a leg fell off during presentation.
(I’m so grateful to Jacky that he video recorded the successful first version.)
After class I thought through and realized the reason behind the unsuccessful second version. I found both I and Jacky ignored one key factor for our first model: the card boards are soft. Because of that, when the robot was about to tilt over and one side firstly touched the ground. the soft material alleviated most of the force so that it wouldn’t fell over; and when the head of a screw got slightly stuck under the body and prevented the movement, it could press against the cardboard and force it out.
Then there are other improvement we could achieve. For example, as professor suggested, we could use bearings in stead of screws for more smooth movement.
#A Brief Introduction and Description of Project Design
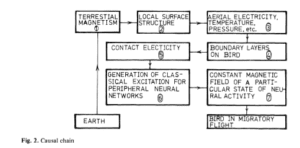
The midterm project achieved the imitation of birds seasonal immigration behavior. It contains three parts in detail: to tell the destination, set it as a target and move towards it; to handle emergence during the forwarding, especially, avoiding barriers when flying (which means on cannot move backwards); and to simulate how the brain status on birds will effect its ability to tell location and avoiding the barriers.
For the hardware, after research, we found birds sense the destination mainly through the earth’s magnet field. Thus, the robot can use the magnet sensor on Microbit for simulation. It also uses the supersonic sensor to detect the barriers, as well as the infrared sensor to tell whether it arrives the destination.
For the algorithm part, a statistical algorithm contains normal analysis is mainly used for the magnet field sense part. The Braitenberg model is suitable for the barrier avoiding part. As for the brain effect, we built a computation model after studying the relevant paper and our result matched the result in organisms studied in the paper.
#Process of Research, Coding and Revision
The paper by Mbaeyi P.N. revealed the mechanics of how birds navigate the destination for migration, that is, by sensing the magnet field.
However, in our first implementation we simply set a threshold, e.g. +- 30 degrees away from the north, and let our robot read the output of magnet, if the output is not in the range of out threshold, it will calibrate its direction.
Although theoretically it should work, in real situation, the direction it moves often showed great error to the north, and it moved in a unstable zigzagging behavior. We analyzed it and discovered the reason: firstly, the magnet sensor itself has error from -10 – + 10 degrees, and a tiny different in degree will cause a huge difference in destination; secondly, we let the robot make decisions based on every output, thus, because of the error, the robot cannot find the accurate direction the more it directs to the north, and its decision cannot maintain for even one second; thirdly, as the motors have a reaction delay, (which mean it often moving in its original direction for a while after receiving an command to turn), thus the robot zigzagged and could not go directly to the north.
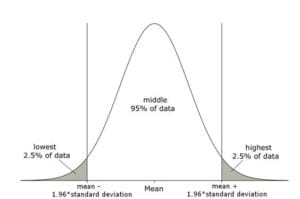
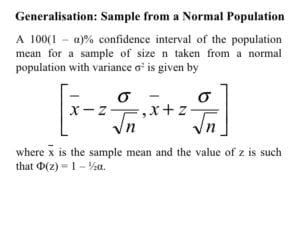
To solve this problem, we designed and statistical model: the robot will take 100 samples of magnet output, which is the degree difference between the robot moving direction and the north. By statics it will form a approximate normal distribution with the mean relatively equals to the real difference and a standard deviation related to the hardware error of the sensor.
Then we wanted to find a n% confidence interval for the distribution, after various test, we find the robot is most stable and accurate when n is about 30.
The robot will take 100 samples each time it need to make decisions (every time a while loop is iterated), then calculate whether the direction of north is within the confidence interval, if so it mean the robot is going approximately North and the robot will move forward, otherwise it will do the calibration of direction.
This algorithm solves the three problems mentioned above at the same time: it reduced the error by using statics; reduced the instable decision making frequency; and although the motor delay still exists, on field tests showed it doesn’t affect much on the navigation anymore.
A distribution with confidence interval 95%
A formula of confidence interval
The barrier avoiding part is quite innovative. The conventional way is to make a robot withdraw a little then turn some angle, however two main reasons prevented us from using that. 1. a bird cannot flying backward; 2. it is not efficient when a bird encounter a long obstacle, e.g. a plane. Although Jacky has not learned coding before, most of this part was done by him.
The last part is to simulate how different brain states influence the accuracy of the bird’s ability to sense directions. After researching on the paper, we discovered that when a bird is in an intensive emotional state, the ion channels controlling the inflow and outflow of sodium ion, potassium ion and chlorine ion will be unstable. It then will cause the instability of the electrical pulse between nerve cells. Thus, we decided that we could quantify the brain state from 0 – 100, then match them each to a confidence interval of n%. It will then impact the accuracy of sensing.
#Reflection
The whole midterm project is a big challenge but in general very successful. During the process we have to be both innovative, such as making new mathematical model, and down to earth such as trying different arguments for the better performance of the motors. There are still the possibility to make improvement. For example, we didn’t have time to make the following mode birds.
#Reference
Whybrow P.C., Akiskal H.S., McKinney W.T. (1984) The Neurobiological Foundations of Behavior: Environmental Challenge and Response. In: Mood Disorders. Critical Issues in Psychiatry. Springer, Boston, MA
https://link.springer.com/chapter/10.1007/978-1-4613-2729-5_6#citeas
Mbaeyi P.N. (1984) Migratory Birds: Path-Finding Using Madar? (Magnetic Detection and Ranging). In: Varjú D., Schnitzler HU. (eds) Localization and Orientation in Biology and Engineering. Proceedings in Life Sciences. Springer, Berlin, Heidelberg
https://link.springer.com/chapter/10.1007/978-3-642-69308-3_63#citeas
Migrating to the south and flooding back in the spring, birds like swan goose always draw our attention for their beauty and accurate sense of direction when migrating. Their behavior is worthy for us to learn and therefore we decided to make a migrating bird inspired robot to achieve it. We searched for many related academic sources and finally decided to applied birds’ sense of direction to our robot by using their way: detecting the earth magnetic field. In addition to this, we also want to approach to display the bird’s behavior when they are facing an unusual scenario. The first emergence handling is similar to the Braitenberg model we implemented last week, and the second is the decision mode switch between following and leading.
Whybrow P.C., Akiskal H.S., McKinney W.T. (1984) The Neurobiological Foundations of Behavior: Environmental Challenge and Response. In: Mood Disorders. Critical Issues in Psychiatry. Springer, Boston, MA
https://link.springer.com/chapter/10.1007/978-1-4613-2729-5_6#citeas
Mbaeyi P.N. (1984) Migratory Birds: Path-Finding Using Madar? (Magnetic Detection and Ranging). In: Varjú D., Schnitzler HU. (eds) Localization and Orientation in Biology and Engineering. Proceedings in Life Sciences. Springer, Berlin, Heidelberg
https://link.springer.com/chapter/10.1007/978-3-642-69308-3_63#citeas