NOT A MOUSE
INTERACTIVE CAT ENTERTAINMENT
 Documentation:
Documentation:
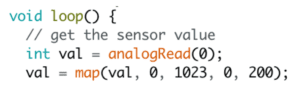
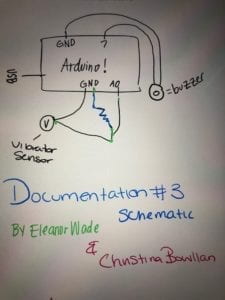
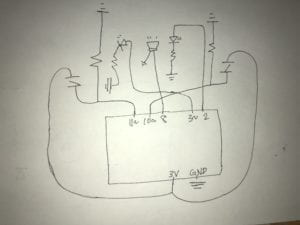
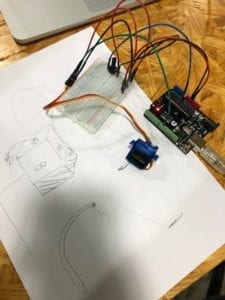
Initially used a potentiometer to understand how we can use this input to control the servo motor. (Micro Servo 9G). Used the examples then knob to use potentiometer to control the servo. Then decided on the ultrasonic ranger (after considering other distance sensors) because it has a larger range potential. Worked with Marcela to write the code using this Ultrasonic ranger to collect information and then send that to the motor to tell it how to move. Initially had a problem in that the motor was moving in really jerky and sudden movements, rather than a smooth path. Changed the range of the sensor to a smaller scale so that the motor would be able to move in more cohesive strokes. This makes it so that the input numbers rather than skipping from 516 centimeters to 7, go more smoothly from 0 to 100 centimeters. Made prototype out of cardboard and washi tape. Design will replicate in digital fabrication. Decided the material should be something lightweight. Worked with Linda the fellow—exceptionally helpful, not only to the creative aspects of our design, but also in technical support. Discussed potential digitally fabricated elements—decided on the laser cutter because of its speed and the ability to assemble interesting pieces, add cute elements. Inspired by other projects found in the digital fabrication lab, decided to put everything into a box. Used the source: https://makeabox.io to select the dimensions of the box we wanted then added the necessary cut-outs to the box on illustrator. Found illustrator to be very frustrating and not at all user friendly. Linda was very supportive to us at this stage as well. She also encouraged another more complete prototype before moving forward with actually laser cutting the final product. Worked with others in the digital fabrication lab to finish the box design and laser cut. Exceptionally helpful and positive.
Initial design & sketch:
Cardboard prototype:

Final product:

REFLECTION:
Context & Significance:
My understanding and approach to this project was definitely influenced by my previous projects and the exploration of interaction thus far. In my first group project with Interaction Lab, my group discussed and created a prototype for Smart Floors, while focusing on the idea of interactive floors that provided a number of different experiences and functions for the user. In this project we demonstrated the importance of interaction through first the idea that the object would sense when people are present and then react to the individual and cater a specific experience. This idea helped to inform my midterm project, Not a Mouse in that initially the device is still, but after sensing a person or animal, a playful and interactive toy begins to move based off the movements being sensed. What is unique and significant about this project is that it demonstrates interaction in very fast and tangible ways. This proved to be both interesting and fun for users in that Not a Mouse quickly moved and responded to their own motion. In my opinion, this interactive toy contributes to the development of cat toys that are already created in that it provides an even more entertaining and responsive experience. What makes this different is that the device continues to move an respond to movements even after the cat has supposedly caught the toy. This device is of value to kittens and kitten owners in that when plugged in, the device can serve as a fun and interactive activity when no human is home to play with the cat. To someone who has frequently been frustrated when they get home to a very energetic kitten, this device is useful in that rather than sleeping all day this device can continue to be fun while also wearing the kitten out when no one is home.
Conception & Design:
In understanding how users were going to interact with the device, we decided to use materials that appealed to the target audience. Because the users are kittens, it makes sense to use something both durable enough to be able to withstand tiny, sharp claws, while also being cute and fun enough to appeal to the owners. Specific design decisions included making the entire device look like an animal, as we felt this appealed to the audience and made the project more creative overall. Additionally understanding that users were not going to be particularly gentle with the design or the mechanical components contributed to our decisions to make the entire device more sturdy. Using the laser cutter was beneficial in that it was fast and very accurate and using wood was not only a nice and natural looking finish, but was also a more economically suitable material choice. Another option would have been to use something fuzzy to cover the whole of the box to make it even cuter in appearance, however this seemed unnecessary in our final design.
Fabrication & Production:
User testing proved to be an exceptionally useful portion of our product design and conception. Watching as humans interacted and played with our funny little animal device was not only very amusing, but also pointed out many key flaws in our design. Following this testing session, much was pointed out to us as problematic or was not as successful as it could be. We changed everything from the type of motor we were using, as it was not strong enough, to the design overall, making the moving arm of the toy into a wire tail instead. These changes were beneficial in that they made the device stronger while also adding more to the design of a little mouse/cat animal. In making the moving toy end a tail I feel we are better staying on theme and purpose with the device concept. These adaptations were effective in that it more clearly conveyed to users what the device is and how it is supposed to be used and interacted with. This also made the experience more fun and relatable, in that users could understand what was happening and what they are supposed to do when they encounter Not a Mouse.
Following the submission of our project, I brought the device home for another round of user testing, this time with my two kittens. This was also a very exciting and educational experience in terms of how we could better design our project to be effective for specifically kittens. In videos below you can see how the kittens interacted with the toy. In this section of kitten user testing I learned that it might be helpful to increase the height of the wire tail, in order to make the fluffy end harder to catch. While Cleo (the black and white kitten) seemed to be enjoying catching the end and following the path of movement, it might be better to make reaching the end of the tail more challenging overall. What pleasantly surprised me about this testing session, however, is that Cleo was able to stay entertained for quite some time even though she could somewhat easily catch the toy. When she would go leave the end of the toy it would move following her movements, catching her attention again, and she would stay to play longer. If I were going to further improve Not a Mouse, I would add both more sensors and arms for a larger audience. It was clear that Pip (the orange kitten) might have been intrigued, although Cleo was stealing all the fun.
Conclusions:
Ultimately, the goals of this project were to use Arduino to create an interesting and interactive device. In focusing on creating an experience, rather than an object, our project’s goal was to be a fun and entertaining experience that responded to the movements of the user. This project aligns with my definition of interaction in that it uses the inputs from the user to provide a new, customized, and entertaining experience. The audience, both humans from user testing and the kittens at home, interacted with the device in positive ways. Both distinct audiences seemed to be having a good time while also continuing to come back to the device for more fun. If there were more time to improve this device I would add even more sensors to provide a larger range of movement and to be interesting to more than just one kitten at a time. In adapting from the various setbacks we encountered, I learned to take the comments and suggestions from users very seriously, as well as be creative in the materials and methods we use to build on the project. I see this project as an accomplishment because I witnessed much positive feedback from users and feel as if the overall appearance is cute and intriguing, while also providing a compelling interactive experience. What makes this project influential is that it takes something very simple — playing with moving toy (or watching a kitten play with a moving toy) — and puts an interactive and customized spin on it.
Experimenting with the Kittens: