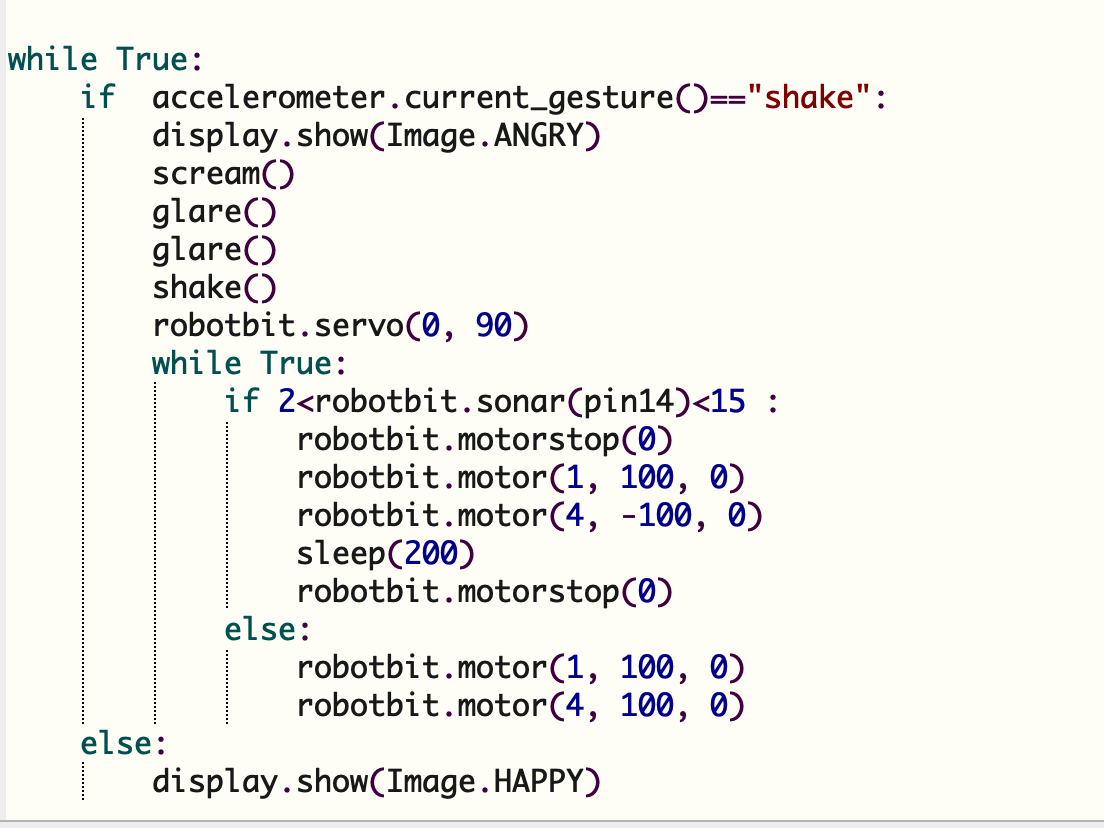
The creature I chose is dogged: the obstacle avoider. This is a normal behavior that every animal possesses. I thought of a scenario when the animal is caught and shaken (the previous idea was to tilt the animal, but the accelerometer stopped working in the middle of my programming), it would become scared. In this case, normally, it would become angry, scream, have a fear look in its eyes, shake its head and run away.
pseudocode: on shake: display angry, scream, glare, shake its head and flee with an obstacle avoiding function.
code:
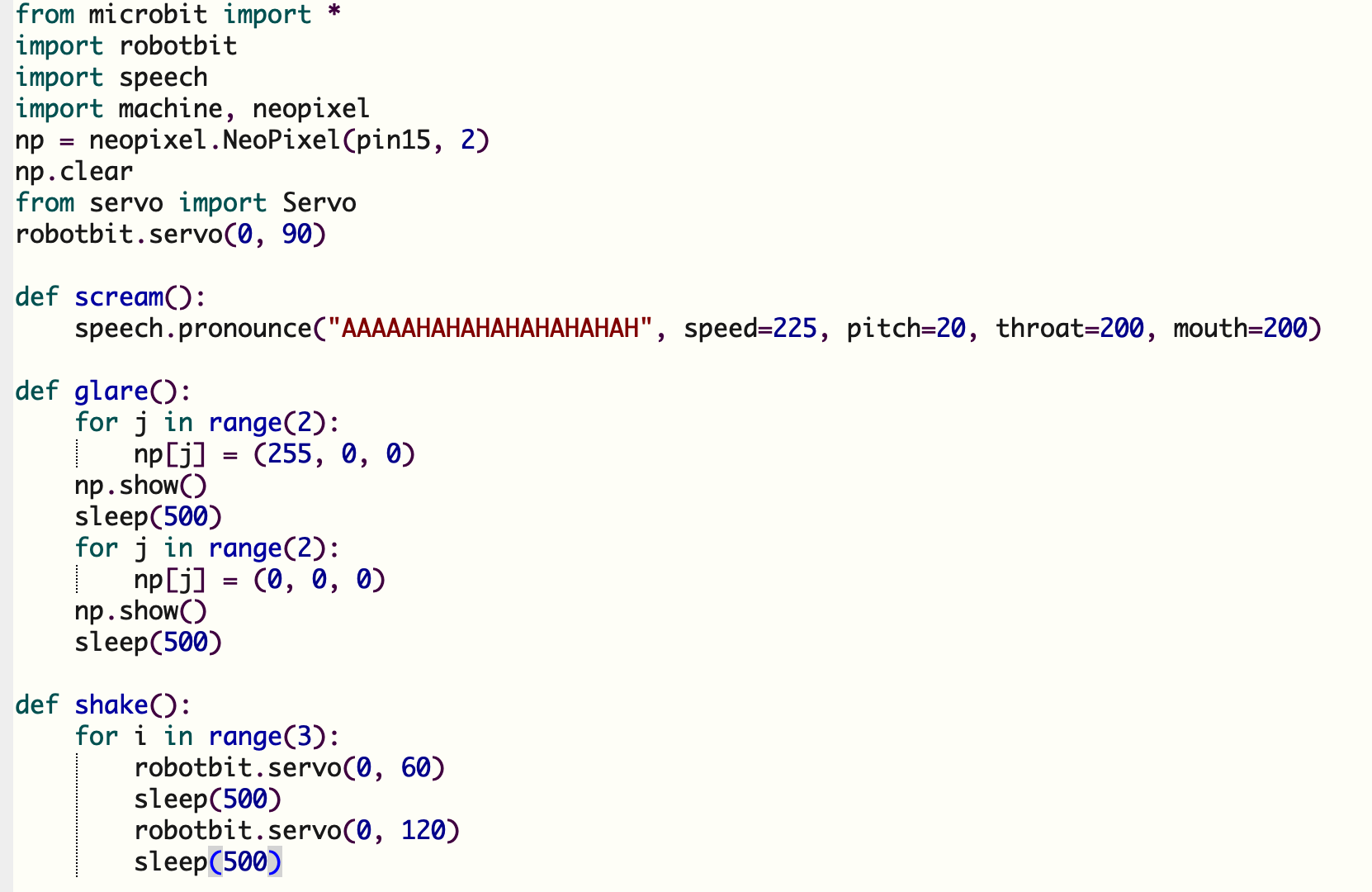
I spent a very long time adjusting myself to micropython to actually make the robot move. Now I think I have passed the struggling period and can control my kittenbot well. Debugging and testing are always required even if one has faith in his/her code.
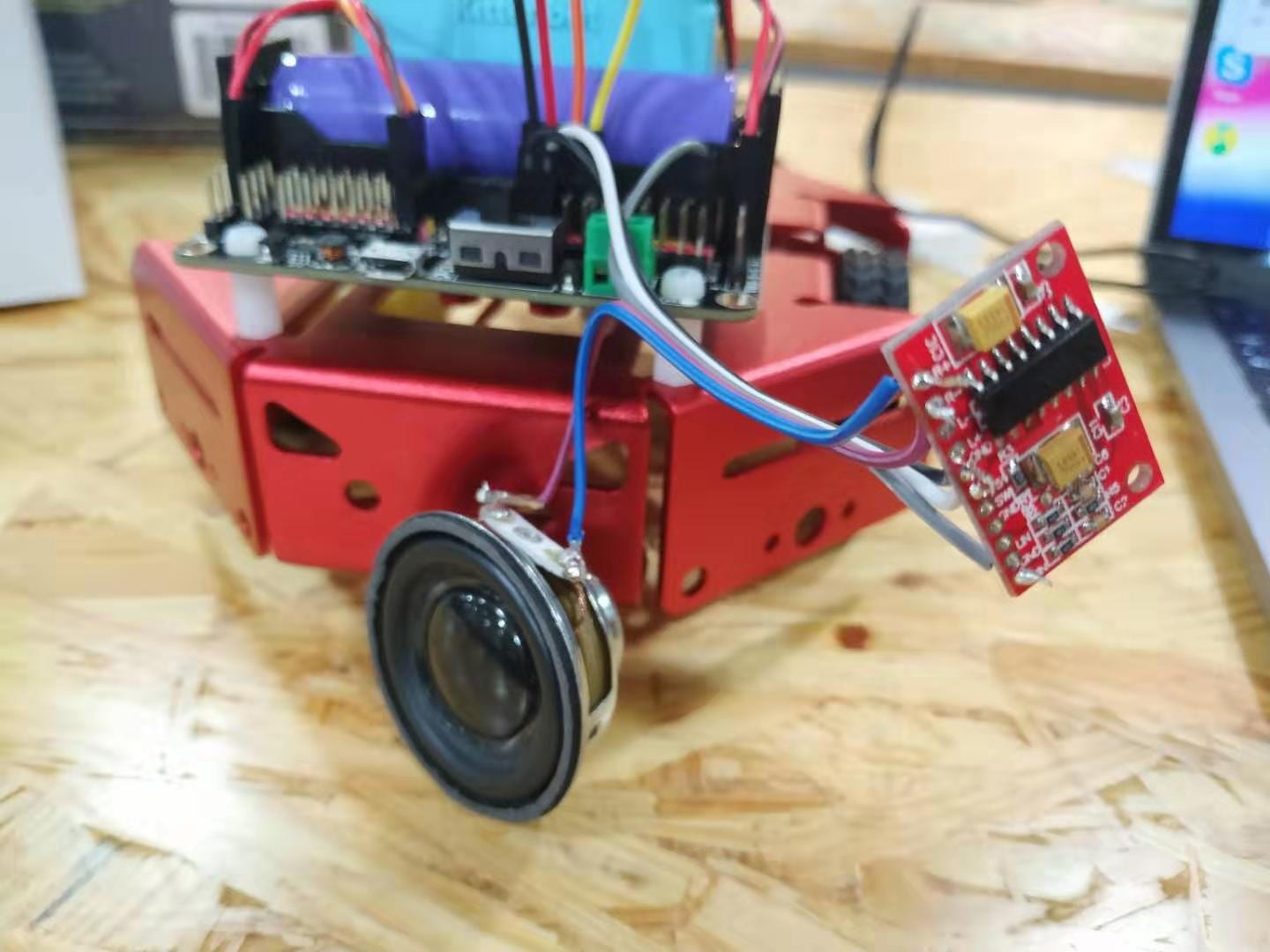
Prof. Rudi also helped me amplified the sound using a speaker and an amplifier. However, robot always sounds like robot ( in this case). The speech function hasn’t developed well, so now the scream sounds like a robotic “oooooyiiiiiii“.
Here is the video:
Imagination: It could be like an animal-like robot like this.

Reflections and improvements:
- Achieve “on tilt” to activate the animal’s anger
- The animal would only run away when it is put down on the ground
- The actual animals respond much faster than this. Moreover, they should be able to accomplish several reactions at the same time.
I was really impressed by this lab because I think it thoroughly looks at animalistic behavior. I think it was additionally cool how you implemented the scream and not just relied on motors as it added another layer of depth