Build:
Due to my experience with building starter robots like this before, I will comment more on the differences I saw between this robot and others.
For one, building this robot was simple, up to a point. I felt that some building instructions were not thought out fully. For example, the micro-servo was put on first, which was fine, but the chip was also added. This is an issue as the pins protruding from the chip would be bent when trying to add the rest of the parts, as the bot would have to be flipped over. Other than that, the wiring diagram was completely inaccurate. More so, even the updated schematics were off. This was by far the hardest part of the entire building process.
Comments on the different additions:
Neopixel:
This feature is useful for showing more data beyond the small “Screen” provided on the board itself. For a robot, it can be useful to have external displays for indicating different signals in multiple directions. At the same time, I don’t know how necessary it would be to add more than a few strips. If it was necessary to display more information, it would be more sensible to route the board to a phone through a raspberry pi (or something along that line).
Servo:
Servos are useful for their limited range and increased precision. In this case, the micro-servo was mainly used to control the direction “eyes” or the ultrasound sensor. This feature is useful for “looking around” or making search bots that can roam around the room alone and not bump into things. However, most servos have very little strength, and so, they can be easily broken, especially this particular servo.
DC motors:
The DC motors on this but are not the best. For one, they don’t all output the same amount of power. This was evident when I had programmed both of them run at the same speed, and when I placed it on the ground, the bot began to curve. To compensate for this, I programmed one of motors to go faster than the other, which helped even out both of the motors so that the bot would travel straight.
Speaker:
Although I did not use the speaker too much, I am aware of many of the benefits of the speaker. For one, it can warn people of its proximity if it is traveling around on its own. Another added feature is to signal when different points in the program are being run, which can be useful for debugging purposes. Other than that, it is also fun to play victory tunes at the end of successful runs, or even the darth vader theme, which my team did with a robot I worked on a few years ago.
My own work:
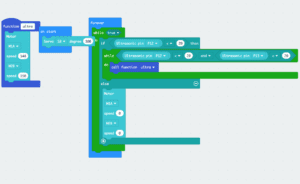
For my own work, I decided to make a simple robot that would follow me around. It simply registered when something was in front of it, using its ultrasonic sensor, and then proceeded to move forward as long as there was something close to it. I made sure to also set the servo position straight ahead whenever the robot initialized. It was fun and easy to build, and I enjoyed playing around with the code as well.
Here is a picture of my code:
Here is a video of the final robot:
https://photos.app.goo.gl/RJRU6Nbjc5qeQcv89
It’s amazing how clear and detailed you described the different parts of the bot. I learned a lot from reading your blog post on the intricacies or the different components available in the kittenbot. Well done 🙂