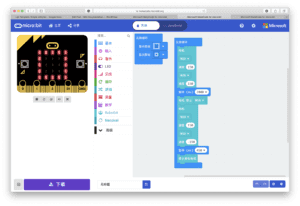
Step 1: Build it!

Step 2: Testing… 1, 2, 3… Testing…
Neopixel
Speaker
Speaker
DC motors
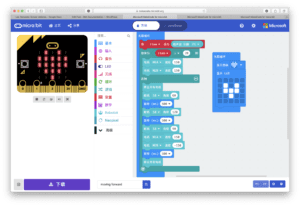
Step 3: Plan your own trajectory
Program a sequence of actions that make your robot move in a constrained space.
( The hardest part is adjusting the stops of the DC motors and the pauses )
Extra step: Automatic obstacle avoidance car
( I’ve tried soooo many times to build it !! )
Really like the fact that you videos everything. Makes it very easy to see and visualise. Good job on adding the extra step. I like how you interplayed both the servo and manipulation of motors. It gave the robot a very organic almost lifelike feel.