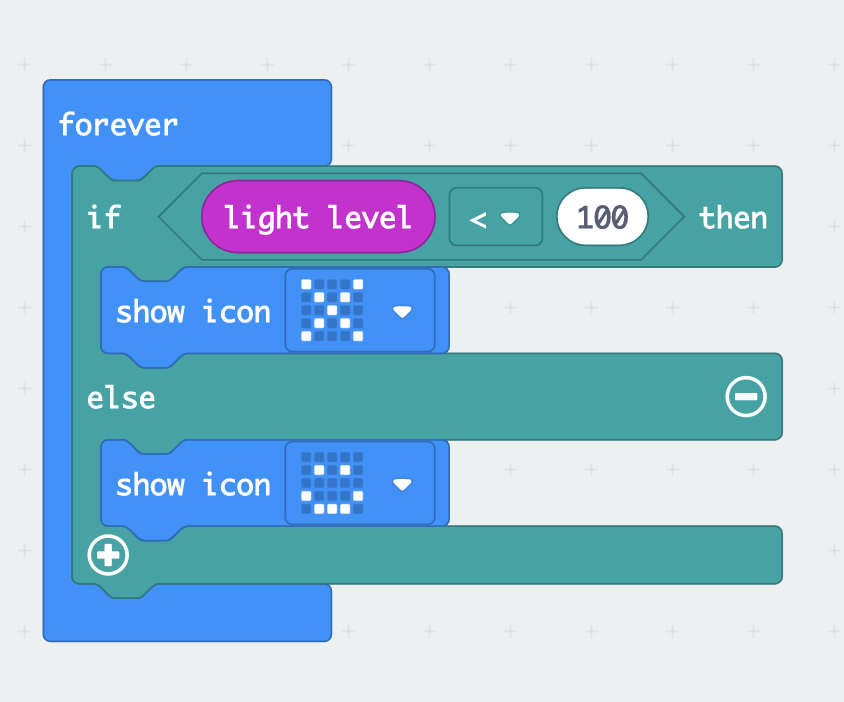
- Testing the light sensor
I discovered that the light sensor is at the front of the micro:bot, while other sensors such as the accelerometer and one more (perhaps the magnetic sensor) are at the back.
I opened the flashlight when filming. Therefore, when the camera gets closer to the micro:bot, the light level is higher and the smile shows up.
2. Wireless communication
When the A button is pressed on the first board, the second board would show the number 0. The communication system is easy to establish, conveying numbers, strings, tuples, etc.
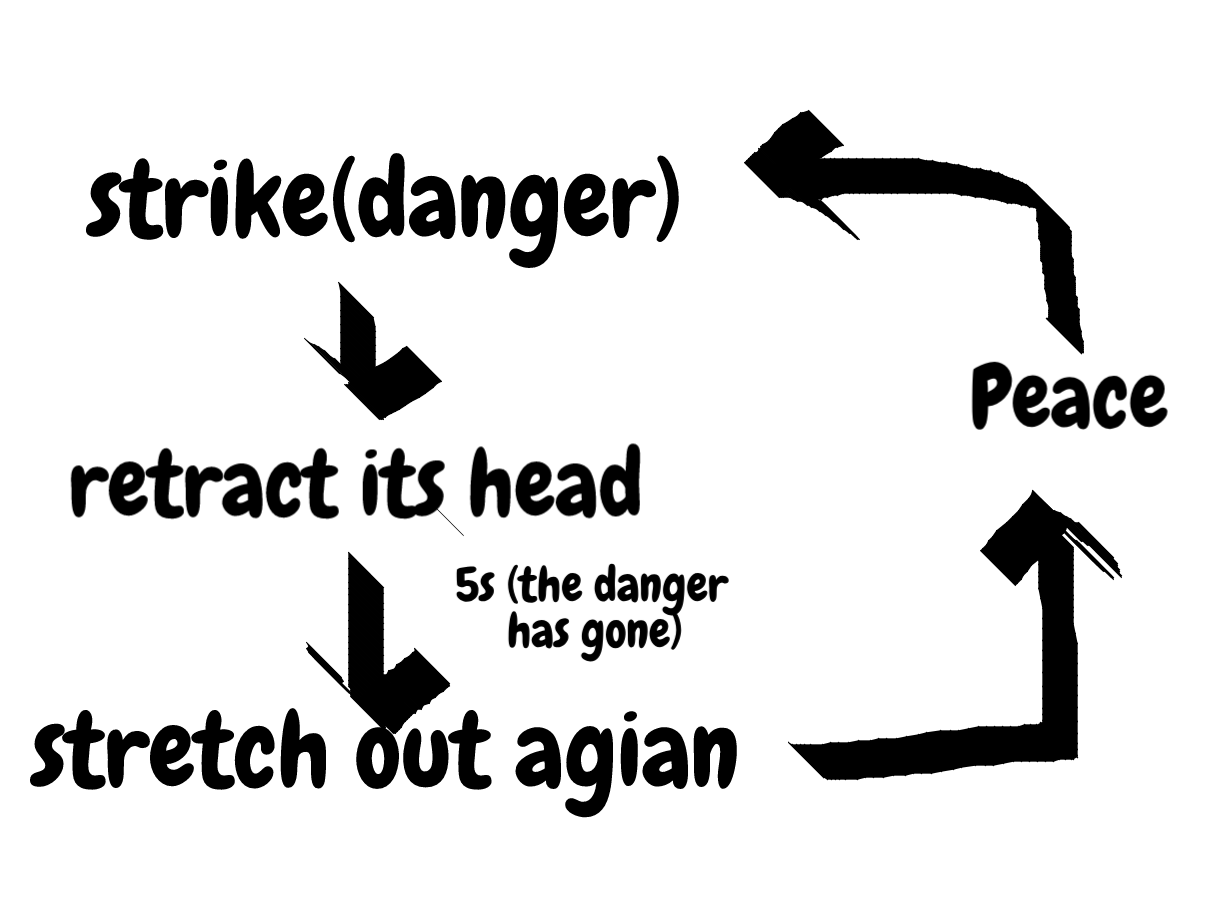
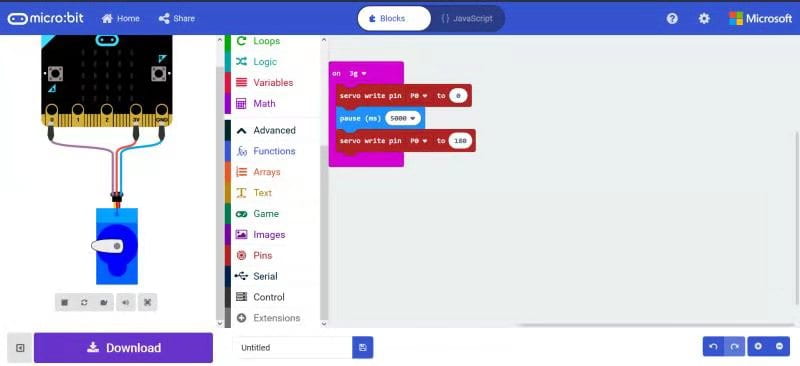
3. Animal behavior system
It imitates the natural behavior of the turtle’s retracting its head when facing danger. The program is simple, and the “turtle” is abstract as well.
Reflection:
Given little time, we had to come up with these very basic ideas. Next time, I shall read and think about the lab template carefully before the class comes, so that deliberateness could be involved in the learning process.
It is impressive that you chose to look at the multiple ways in which the microbot can be used (sensors, wireless communication, the ‘brain’ for other externally added components) I was particularly interest in the way you manipulated the light sensor and its code as my partner and I tried to that as well but ran into some trouble. Looking at your code made me realise we may have been using the incorrect blocks. This is a testimony of how we can all learn from each other