Introduction
In this week’s recitation, we explored the concept and use of actuators in building machines that produce movement through the Arduino and higher power voltages. We did this by using a H-Bridge to build a drawing machine powered by a stepper motor.
Materials: The list of materials has been taken from the IMA recitation website as a reference for the components mentioned in the rest of the documentation.
For Steps 1 and 2
1 * 42STH33-0404AC stepper motor
1 * L293D ic chip
1 * power jack
1 * 12 VDC power supply
1 * Arduino kit and its contents
For Step 3
2 * Laser-cut short arms
2 * Laser-cut long arms
1* Laser-cut motor holder
2 * 3D printed motor coupling
5 * Paper Fasteners
1 * Pen that fits the laser-cut mechanisms
Paper
Step 1:
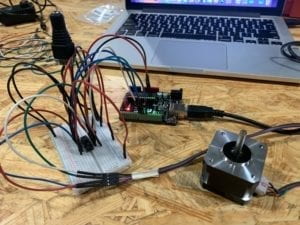
Initially, I was afraid of how difficult the task might be, and whether I would damage my computer or not due to the voltage changes. As in the past recitations we’ve only used 5V, however this time due to the nature of the machine, a 12V power was necessary. Nevertheless, the circuit building was quite clear in terms of the connection to the H-Bridge. This component was necessary in order for the DC (Direct current) stepper motor to be able to run forwards or backwards, in other words, it was used to switch the polarity of voltage applied to the circuit. I decided to color code the wires so that I had less difficulties identifying the cables to know they were in the right place, and making sure I did not cross the voltages with each other to prevent computer and circuit damages. In the end, after considering these aspects and running the code, it worked perfectly.
Step 2:
While completing step 2 of adding a potentiometer in the circuit in order to control the rotation. I initially found it challenging as the mapping function was still unclear to me, and in order for the motor moving via input from the potentiometer, it needed to be programmed with analogRead. However, after overcoming the challenge of mastering mapping to the minimum and maximum values of both analog and the stepper motor; I was able to match the movement of the knob with the rotation of the motor, so that way it was ready to spin the laser cut pieces of the drawing machine.
Step 3:
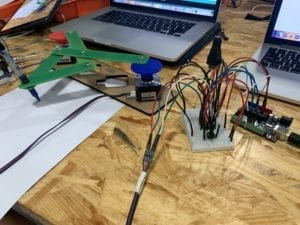
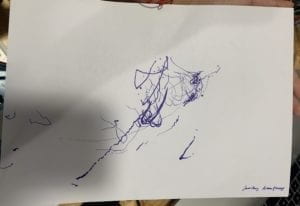
The final step of actually assembling the machine was more challenging than originally thought of, as despite having all of the pieces together, it was difficult to control the motor with the potentiometer because it would sometimes rotate with such power that the motor slipped out of the laser-cut motor holder, and the paper fastener couldn’t always hold in place the laser-cut arms. However, even though my partner and I weren’t able to fully control it, we still managed to create a masterpiece with our drawing machine.

Question 1:
The kind of machines I am mostly interested in building are those that give a deeper use to technology and interaction. The kind that make everyone’s lives easier, more comfortable, and accessible. One example of an idea I’ve always had in mind is the creation of smart glasses that transcribe a person’s words into text, and could help individuals with hearing disabilities understand what others are saying, even if there’s no other way of translation through actions such as sign language. Within this type of portable machine, I would use actuators as the ‘mover’ of energy that in fact makes possible this translation. That way, those who wear the glasses aren’t overwhelmed with long texts of what people say to them each day, instead have control over the sound energy that the actuator in the glasses would be received and translating into text.
This type of object may seem different to those machines that are used to move items or in the digital manipulation of art, as it doesn’t create as much as a visual kinetic movement for an audience. Nevertheless, it serves a purpose and still demands a creative process into its fabrication.
Question 2:
The installation that captured my attention in the reading was David Palacios’ artwork called Waves (2006). I found it captivating because it does not only involve the movement of a rope, but also the movement of people. As the sine waves with motion aren’t activated until there is a stimuli from the movement of viewers. Therefore, in some way it could be said that the audience had a certain control over the oscillations even if they did not acknowledge it. This was similar to the work I did during the recitation, as regardless of the stepper motor being able to move the rest of the drawing machine on its own, it was my partner and me, along with the use of potentiometers, who truly had some control over what was being illustrated with the machine as a whole. I consider that the artist selected those specific actuators for his project, with the idea of giving the viewers a much greater kinetic experience appreciating waves that surround society in more ways than we think. In fact, the presentation of this motor through this rope, creates an audiovisual illusion that allows us to acknowledge waves much more profoundly than those we see in the ocean, or the sine graph of a function. Instead the art installation allows us to perceive them with a sense of life; as if they are moving with us while we are moving with them.