Locomotion
In the locomotion lab, we tried hard to make our bio-inspired robots get rid of wheels. By removing the wheels, they will look more like a creature.
At first, we tried to make the bouncing legs.

However, because of the lack of enough friction, the creature cannot stand up by itself and always fall down when the motor starts rotating.
Therefore, we decided to find another solution to change the circular movement of the motor to a circular-linear combined one to achieve stability.
Then we found a mechanics’ solution on YouTube.
Prototyping
We first came to the box room to find a suitable box for our creature (we called it a two-leg lizard). Then, we shaped the box by stretching up to its inner distance between the two sides that we are going to put the motor on. After that, we cut off 4 holes for the screws and motors to go through.
Moreover, we resized the scale of the legs to fit the box. We first used the Adobe Ai app to designed the vectorgraph, then used laser cutters to cut out the shape (here we used the MDF material to make it solid).

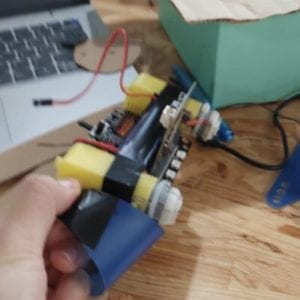
After laser cutting, we tried it in our box to make sure it works well. However, it has some problem with the wheel parts and the crews seem to have stuck.
Then, we slightly resized the box for more than a hundred time and finally make it moving stably!!! And this is the final product looks like.
However, since we still have 2 days more, we decided not to stay here, we want to make more progress, so we redesigned a whole new MDF box for it.
We used the makercase.com’s resource to make the overall structure of the box, then used the Adobe Ai app to add the details, then finally used laser cut to make it out.

Above is the two-leg lizard with MDF box.
Unfortunately, when we tried to test it’s mechanic’s moving, something bad happened. because of the thickness of the MDF material (3mm), we cannot apply the motor bearing, rotating circle part, and the linear moving part of the leg together. The length of the bearing is not enough for those.

And if we tried to use the hot clue to strictly fix them together, the friction of the clue is not allowed for natural moving, and this leads to the failure of the two-leg lizard to stay balanced while running (just as same as we see in our in-class presentation).
If we have more time, maybe we can find a solution by finding a thinner material or use some special screw to play a role as an extra-length bearing. I wish we could find a better solution and make bigger progress when making our final.