Sand Pattern with Pufferfish

Video documentation:
Inspirations:
check here for our inspirations.
Development:
-
- Hardware:
Version 1: We used normal motors with flat magnets attached to the robot. The normal motors are easy to control, but they can’t draw perfect curves. So we gave up these motors.
Version 2: We used steppers, which have higher accuracy. However, they moved really slowly. And the force between flat magnets and the magnet ball is too strong, so the magnet ball can’t draw shapes smoothly.
Version 3: We replaced the flat magnets to magnet ball. With a smaller attraction area, the force is good for magnet ball to move smoothly.
-
- Sand:
We got 10kg sand in the beginning, but we found that thick sands will weaken the magnet force. We only used very thin sands in the end.
-
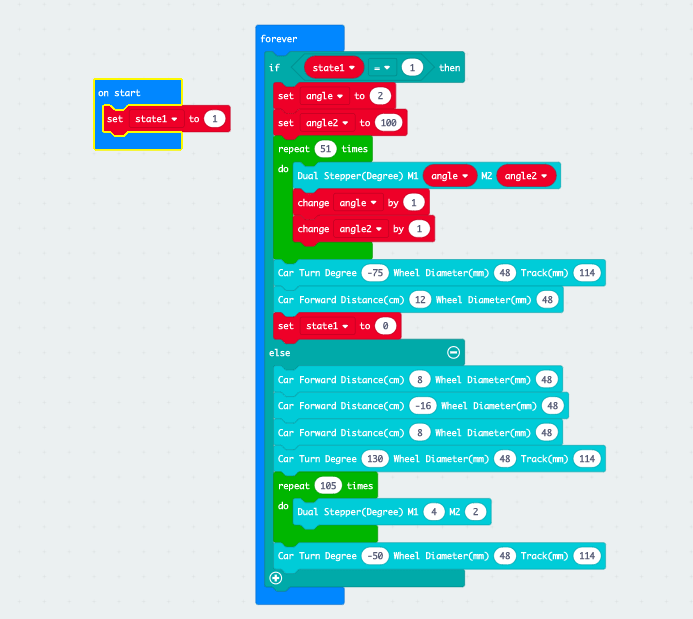
- Code:
We did a lot of calculations about angles and length, but the result of the calculation was so different from the fact. So we gave up the calculation and experimented with random numbers.
-
- Pattern:
We created the outline and spiral separately and combined them in the end. After the combination, the path of the car got messed up. We fixed the data to make sure it can go back to the beginning position.