
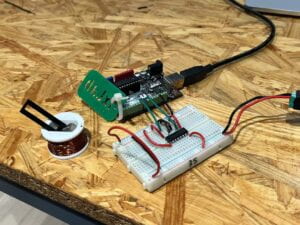
In the actuator exercise, we made an electronic actuator on our own by wrapping the electric coils around a 3d-printed (by Marcela) cone (it is hollow and we used a toothpick to connect the cone and rectangle-shaped pick, with a magnet inside) using the sewing machine.
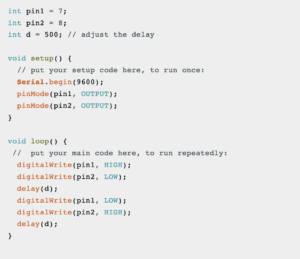
For the circuit part, note that there is an H bridge to switch the direction of the voltage supplied.
Movement1: Rotation Mechanism


Movement2: Scissor Mechanism
Marcela helped me with using servos to make the scissor mechanism, but it didn’t work out very well because it was difficult to fix the position of the servo and one end of the mechanism. In the end, Luna and I switched to a manual way.

Movement3: Inflatables
We made some silicone inflatables using Marcela’s molds and silicone. Later we found out that the fingers on the rubber gloves that we bought for previous assignments could also be used as inflatables and they worked even better.