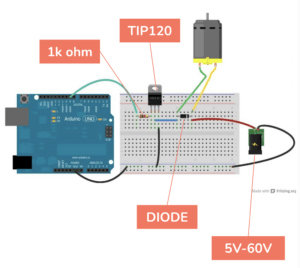
In the inflatable exercise, I learned to distinguish and utilize the functions of different equipment, like motor pump (dc motor that pump and suck air), solenoid valve(three ports, two to connect with the motors, and one to connect with the inflatable), silicone pipe(to connect the motor and valve), TIP transistor(to translate the voltage sent with arduino into the voltage that a power supply is giving to something), and diode(it had polarity, to prevent the current from flowing into the computer).
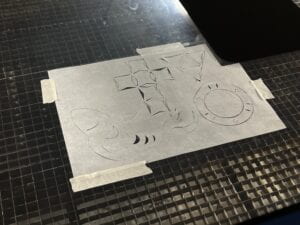
The inflatables were made using baking paper (laser cut into different shapes) and TPU plastic (2 layers sealed). The part where there are three layers (tpu, baking paper, tpu) will not be sealed and thus become the air pocket.
One of our inflatables is in the shape of a fish, and when the motors are bumping and sucking air into and out of it, it looks like that the fish is slightly breathing. It could be embedded into our project as an interactive biosimulation device, when connected with other sensors, which could better simulate real movements of living creatures in a natural way compared with other motors.
Arduino code
int motorPump = 9;
int valve = 10;
int motorSuck = 11;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(motorPump, OUTPUT);
pinMode(valve, OUTPUT);
pinMode(motorSuck, OUTPUT);
}
void loop() {
// inflate
digitalWrite(motorPump,HIGH);
digitalWrite(valve, HIGH);
digitalWrite(motorSuck, LOW);
delay(1000);
// deflate
digitalWrite(motorPump, LOW);
digitalWrite(valve, LOW);
digitalWrite(motorSuck, HIGH);
delay(1000);
}