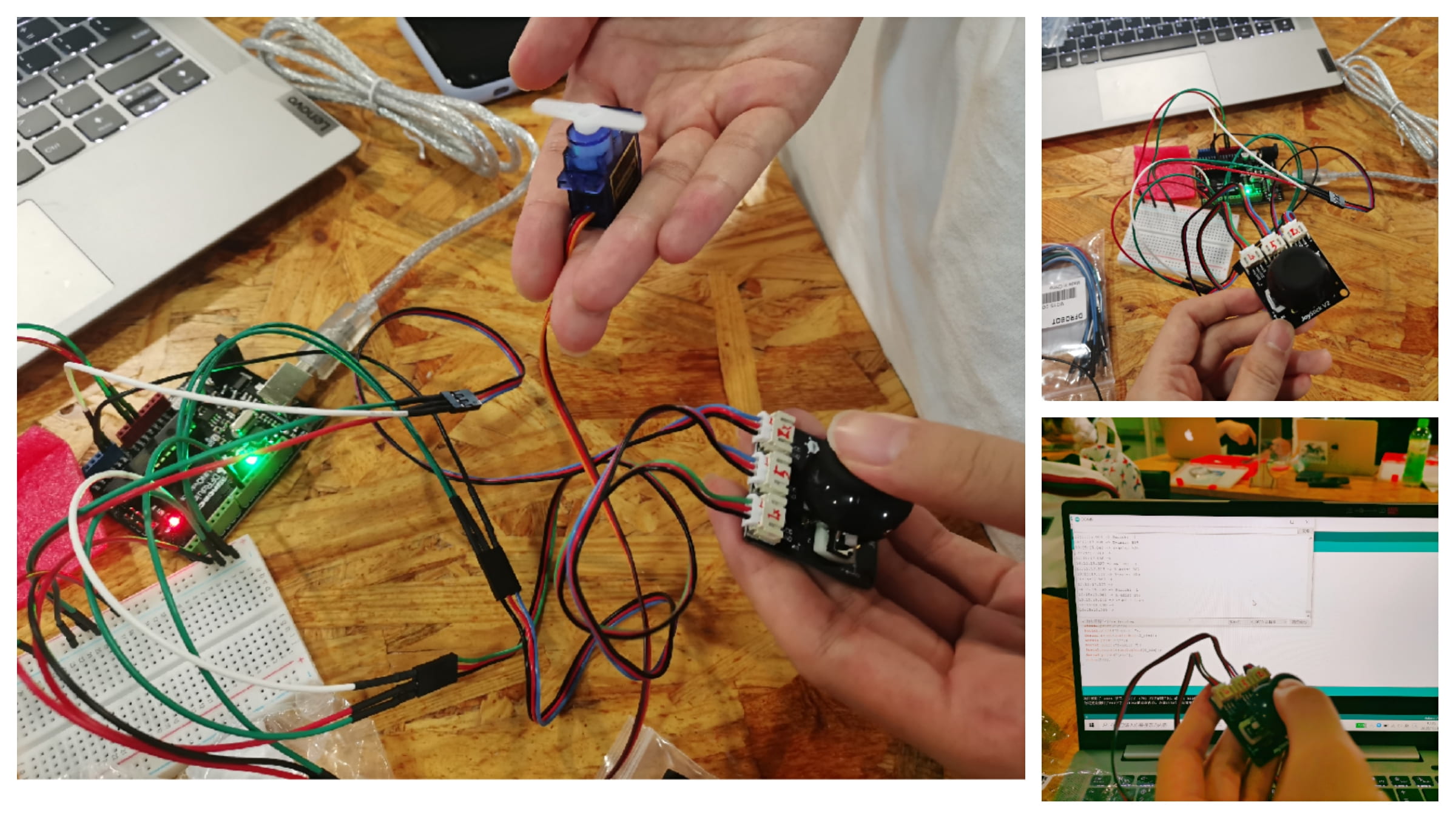
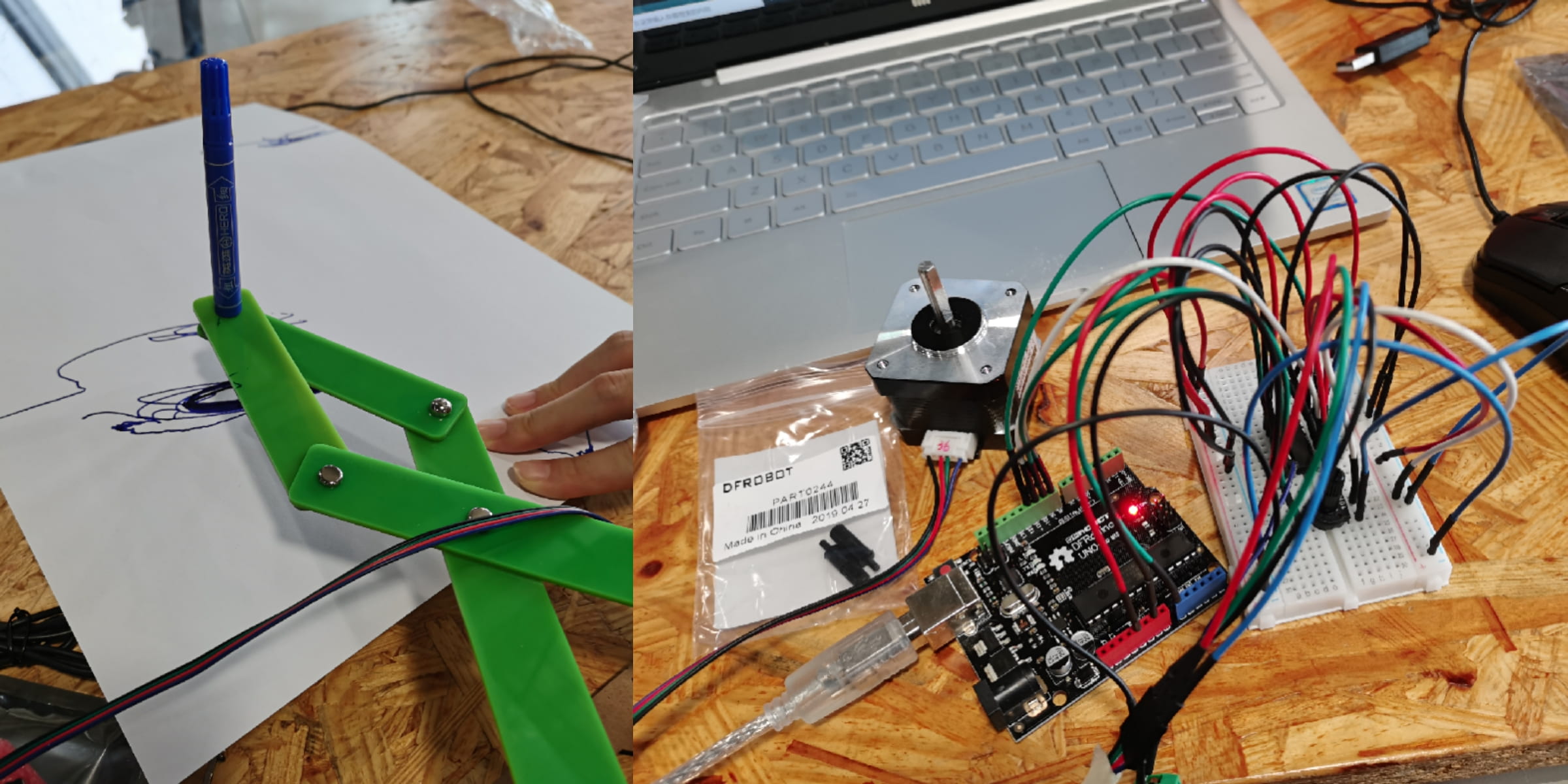
During this recitation, we tried to build a drawing machine.
The most challenging part in the whole process must be using the function map to match the movement of the knob with the rotation of the motor. It requires a calculation on mapping the knob’s moving angle to motor’s rotating angle.
Followed is the final code we use:
/*
* MotorKnob
*
* A stepper motor follows the turns of a potentiometer
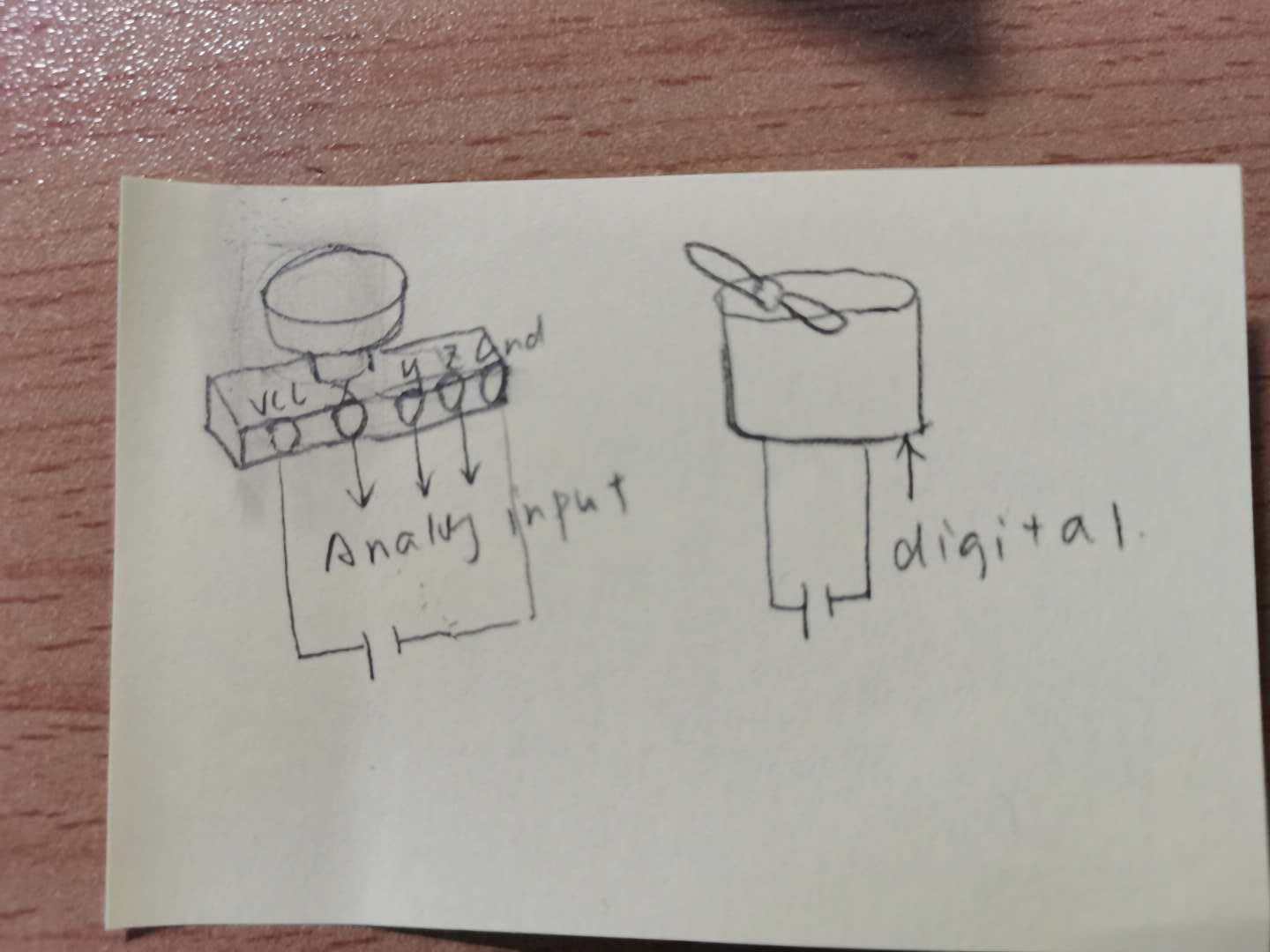
* (or other sensor) on analog input 0.
*
* http://www.arduino.cc/en/Reference/Stepper
* This example code is in the public domain.
*/
#include <Stepper.h>
// change this to the number of steps on your motor
#define STEPS 200
// create an instance of the stepper class, specifying
// the number of steps of the motor and the pins it's
// attached to
Stepper stepper(STEPS, 8, 9, 10, 11);
// the previous reading from the analog input
int previous = 0;
void setup() {
// set the speed of the motor to 30 RPMs
stepper.setSpeed(30);
}
void loop() {
// get the sensor value
int val = map(analogRead(0),0,1023,0,128);
// move a number of steps equal to the change in the
// sensor reading
stepper.step(val - previous);
// remember the previous value of the sensor
previous = val;
}
And it’s not accurate enough that there are still some angles it couldn’t cover.
Although it’s just simple movement made by the machine, but how to communicate with a machine using a language much different from what we familiar with in daily life is definitely not easy, and the process is absolutely inspiring.
Q&A
Question 1: What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I want to build a machine which can turn my words into animated picture when I say something that I want to record to it. It should contain a speaker to receive and recording my voice, and digital processing core to transform my voice into animate, together with projector which can show the final pictures.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
The art installation attracting me is the Drumming Subhuman. It’s a computer-controlled robot who is able to perform drumming by imitate human’s movement.
The drawing machine we built in class seems much simpler than the robot, but still the drawing machine cost us much time trying to build up communicating connection and control circuit, no mention the difficulty of the robot. And also the robot is intelligent and is able to create lyrics, which create a special form of art, but our drawing machine is still controlled by human’s will.
To select appropriate actuators for the installation, first of all the artists should be clear about what function they what for their installation, then match it with specific actuators. And the process acquire transition and combination, to use basic actuators achieving difficult function. Such as to imitate hands’ movement while drumming, they need physical connections like bones and muscle controlled by motor, and sensors helping to control the speed while the hands drop and bounce.