This time, we built a drawing machine. It was really fun and satisfying to actually build a machine that can do some art work automatically by ourselves. There were quite a lot of components, which me and my partner felt a bit anxious about, however we had confidence and were exited to build this machine.
we started with building the circuit. We’ve practiced the connection of the H-bridge during the lecture, so that it was easy for me to connect the wires, and doing this also refreshed my memory as well. We followed this diagram to connect it.
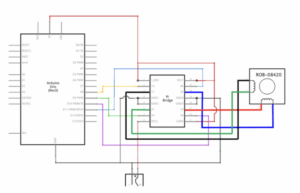
After connecting the H-bridges, we continued to connect a 10k potentiometer on the breadboard to read the analog input.
Then, after me and Jessica both finish our circuit, we started to assemble the arm for the drawing machine with the laser-cut arms and paper fasteners. And we also combined the code for the stepper with the one for the potentiometer.
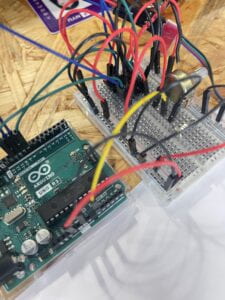
Below are our artistic drawing machine and its artistic work!!

Question 1: What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I would be interested in building the machines that has a high level of interaction with people, by which I particularly mean that people can have fun when engaging with the machine. However, although in this recitation, the machine doesn’t really interact with people that much, it does imitate people’s action—-it paints! It has two arms, just like we do. And the two arms can hold a pen to do some actual painting. It’s also interesting to see the machine itself conducting some artistic works and paint something that none of us has expected. It’s like that the machine itself also has its creativity, which is really fascinating.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
In this chapter, I noticed the Exoskeleton designed by Stelarc. The skeleton he designed enable him to move in non-human ways. Which is, just the opposite of the drawing machine we built in this recitation. What we built, is a machine that has human way of actions. which the Exoskeleton makes human to do non-human actions. This is a reverse of character human and machine play in the process of interaction, which also inspire me that the imitation can be multidirectional. I think the artist chose the actuators with the purpose of breaking through human limits. The actuators may be some speeding motors to speed up normal human motions, detecting sensors to detect wispy things that human normally can’t sense and so on.