Fixed?
Satya Tirtha
Rodolfo Cossovich
Fixed is inspired by a small puzzle that I remembered seeing in one of Chris Ramsay’s YouTube channel or his Instagram (@chrisramsay52) where he solves puzzles – both powered and not powered by electricity. Specifically, it was one puzzle where he had to spin a box to complete it. Back then I was amazed and later realized that a tilt sensor would give that same effect. Hence, I came up with the initial thought of making a puzzle that goes against “normal thinking” – like somehow forcing the user to spin instead of tilting to activate a tilt sensor.
Process of Making Fixed?
Since the project is about doing things that are not “normally thought of”, I decided that the mechanisms is more important than the physical design of the product. Because of this, the approach that I took when building the project is the opposite of what one would normally go for, which has its pros and cons that is written at the end of the blog. During the process of building, I would first develop the program before the physical product. This way, I could just later design and make something that could make use of the mechanism.
Initial Design
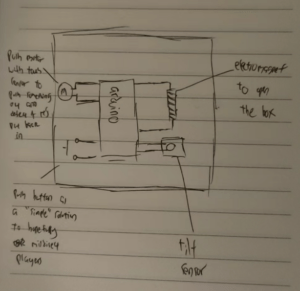
The initial design for the project was simple – it was a cardboard box that had an electromagnet, a solenoid, push button, a tilt sensor and an Arduino. At this point, I knew that spending more time on the design will be less productive; hence, I decided to write the code down before building anything concrete.
To complete this puzzle, users were initially supposed to:
-
-
- Spin the box, activating the tilt sensor
- The solenoid will push a pin out
- The user must use the pin to press the button
- The user must wait for a few seconds
- Anything that the user do after a few seconds is over will unlock the box
-
However, this changed as I further developed the project.
Project Development
Since the project is supposed to be done in stages, it was developed and tested in a “modularized” way and the puzzle ended up having these features and sensors:
-
-
- The tilt stage
- Tilt sensor
- Solenoid pushed out, where users will have to push it back in
- Solenoid
- Touch sensor (to detect whether the solenoid has been pushed back in)
- The waiting part of the puzzle
- The button push to finish puzzle
- Push button
- LED (to indicate that the puzzle has been completed)
- Servo (to indicate that the puzzle has been completed)
- The tilt stage
-
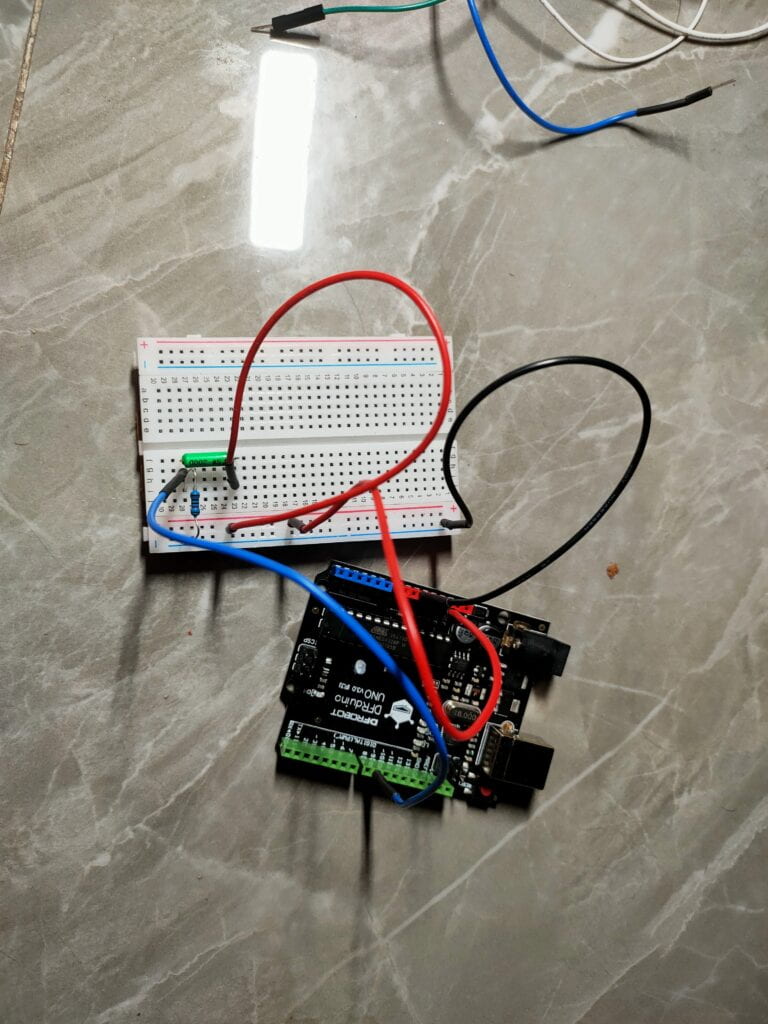
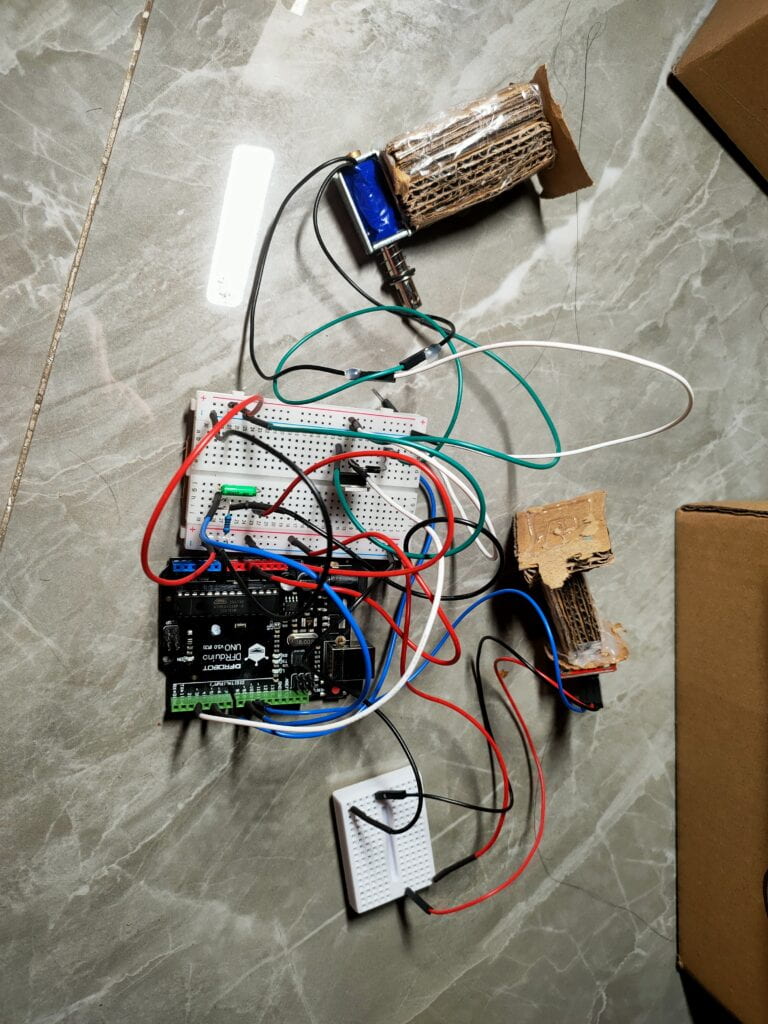
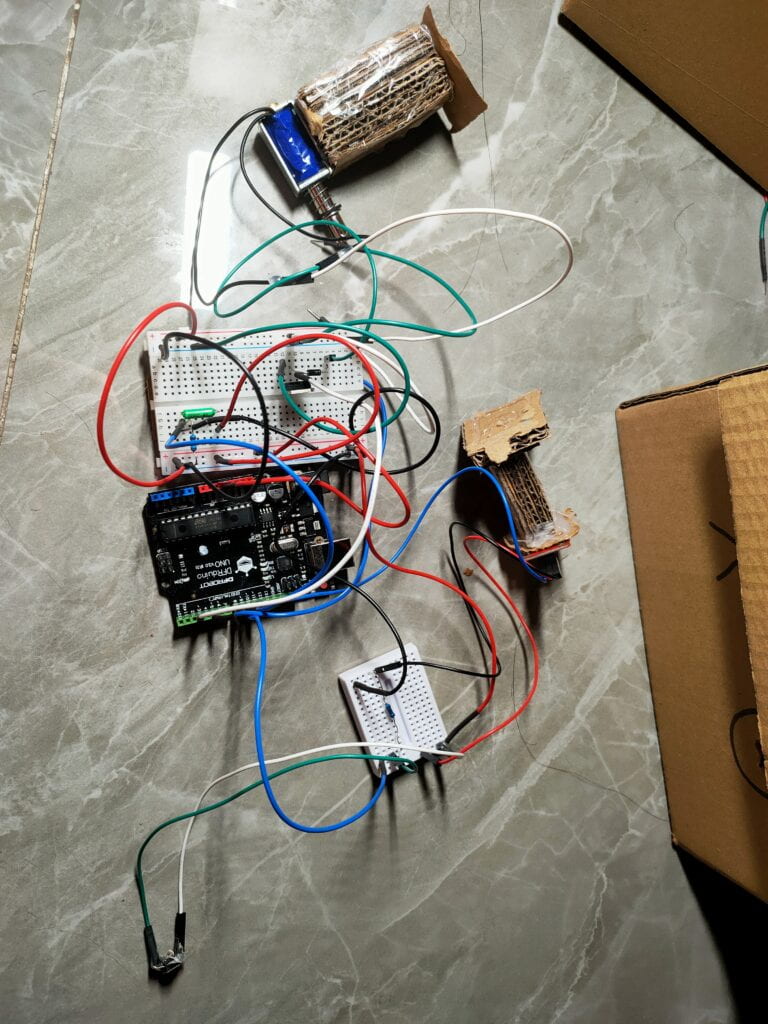
Each of these stages were first coded then tested with the previous stages – for example, when stage 3 is tested along with stages 1 and 2 to ensure that everything works smoothly. In the end, I decided that the mechanisms will be put in a “robot” instead of a small puzzle box. The reason is that puzzles that Chris Ramsay have done have themes and I could not think of one that could be made wit ha small puzzle box; hence, I decided to have the theme of “fixing a broken robot” through “not normal” processes; however, at the end, users will only have to press a button to “fix” it. The series of images show how they were developed:
The code entirely follows the design pattern of states, which is hyperlinked for reference and will not be explained further in this blog post. The full code is put in the appendix. An example of a state:
class TouchStage : public Stage {
private:
int prevTouchState = 0;
bool onTouchTimer = false;
int timer = 0;
bool completed = false;
bool calibrated = false;
public:
TouchStage() {
Serial.println("Touch stage");
if(digitalRead(INPUT_TOUCH) == 0) {
calibrated = true;
}
}
bool checkComplete() {
return completed;
}
Stage* nextStage() {
return new ButtonStage();
}
void execute() {
int touchInput = digitalRead(INPUT_TOUCH);
if(calibrated && prevTouchState == 0 && touchInput == 1) {
onTouchTimer = true;
digitalWrite(OUTPUT_PUSH, LOW);
}
if(!calibrated && touchInput == 0) {
calibrated = true;
}
if(onTouchTimer) {
timer += DELAY;
}
if(timer >= 5000) {
Serial.println("Moving arm up");
armServo.write(60);
onTouchTimer = false;
completed = true;
}
}
};
In short, each stage will keep executing its designated action, check for its completion – it will check for the inputs from their designated sensors, and then go to the next stage if it is completed. This code will make the puzzle loop itself, which was developed for the User Testing phase so that I will not have to manually press the reset button on the Arduino repeatedly.
Changes After User Testing
A big change that I had made to the project was having some form of animation that tells the user that the puzzle has been completed AND is restarting. This leads to one of the bigger decisions that I have to make when I coded was deciding whether I should make the movements non-blocking (checking the timer) or blocking (using delay). The robot eye’s flickering animation uses delay afterwards as I do not want the users to do anything during the animation; however, as the robot is shutting down – when its arm starts slowing down – I used a non-blocking method of animation since I want the eye to flicker at the same time. This is as follows in the animation of the robot:
....
for(int i = 0; i < 255; i += 10) {
if(random(1, 10) < 3) {
analogWrite(OUTPUT_LED_EYE, 0);
delay(50);
}
analogWrite(OUTPUT_LED_EYE, eyeBrightness);
eyeBrightness = i;
delay(50);
}
alive = true;
delay(1000);
....
if(waveCount < 10) {
if(timer % 150 == 0) {
if(armUp) {
armServo.write(80);
} else {
armServo.write(60);
}
waveCount += 1;
armUp = !armUp;
}
}
A major issue that the project had was during the second stage where users have to push the solenoid back into the robot’s head. The solenoid’s and touch sensor’s non-ideal placement made it such that the program thinks that the user has already pushed it back into the touch sensor – activating the timer move on to the next step in that stage. However, I modified the code to try to take account for that problem by checking if the touch sensors starts in an activated state. Furthermore, the solenoid would sometimes not activate properly – which could be because of bad wiring or just a lack of current passing through it. This is as follows in the second stage of the puzzle:
...
private:
int prevTouchState = 0;
bool onTouchTimer = false;
int timer = 0;
bool completed = false;
bool calibrated = false;
public:
TouchStage() {
if(digitalRead(INPUT_TOUCH) == 0) {
calibrated = true;
}
}
...
A minor change that I made was the battery placement. Initially, the batteries were placed in the head of the robot; however, I found out that it imbalanced the head, which made it tilt – constantly activating the tilt switch. To fix this, I moved the batteries into the body instead and slightly lifted the tilt switch so that it is always in a deactivated position.

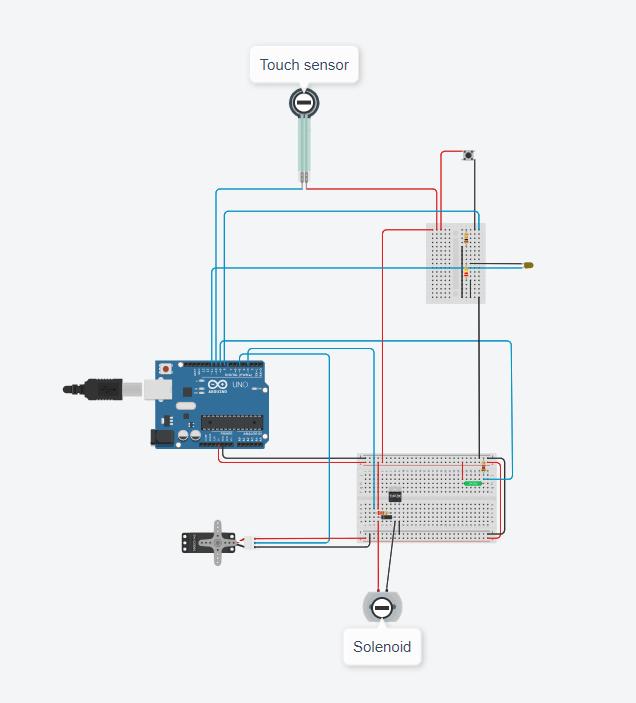
The final circuit diagram is as follows:
Reflection
Before the final presentation, my project broke down – which I still could not completely determine why. I had planned to take a video during this stage to showcase the interaction between a user and the product (since that my project also broke during user testing); however, since it broke, I could not take one. From this, I learned that documenting more regularly during the development phase could have prevented this problem; moreover, I could have recorded an example interaction between myself and my project.
I have also learned other things on the development process, which is summarized as follows:
-
-
- “Reversed engineering” development process
- (Pro) Physical design can be more flexible since mechanism is finished first
- (Con) Physical design should be given more thought before developing mechanisms
- (Con) Might be usable in small-scale projects; however, should not be done in larger-scale projects
- The “modularized” method of development
- (Pro) Easy debugging since we make sure previous parts are working
- (Pro) Makes sure that the mechanisms are working properly before fitting into physical product
- “Reversed engineering” development process
-
Appendix
Full code
#include <Servo.h>
// pin numbers are constants
// as they should not change
const int INPUT_TOUCH = 10;
const int INPUT_TILT = 9;
const int INPUT_COMPLETE = 8;
const int OUTPUT_PUSH = 3;
const int OUTPUT_SERVO = 5;
const int OUTPUT_LED_EYE = 11;
const int DELAY = 10;
Servo armServo;
class Stage
{
public:
virtual bool checkComplete() {
return false;
}
virtual Stage* nextStage() {
return NULL;
}
virtual void execute() {
}
};
class TiltStage : public Stage
{
public:
TiltStage();
bool checkComplete();
Stage* nextStage();
};
class ButtonStage : public Stage {
private:
int prevButtonState = 0;
bool armUp = true;
bool completed = false;
int timer = 0;
bool alive = false;
int waveCount = 0;
bool animating = false;
int eyeBrightness = 0;
bool onReleased() {
int input = digitalRead(INPUT_COMPLETE);
if(prevButtonState == 1 && input == 0) {
prevButtonState = input;
return true;
}
prevButtonState = input;
return false;
}
public:
bool checkComplete() {
return completed;
}
Stage* nextStage() {
armServo.write(180);
return new TiltStage();
}
void animate() {
// here it is okay to use delay
// since we don't want the user
// to be interacting during
// the 'animation'
if(timer == 0 && !alive) {
for(int i = 0; i < 255; i += 10) {
if(random(1, 10) < 3) {
analogWrite(OUTPUT_LED_EYE, 0);
delay(50);
}
analogWrite(OUTPUT_LED_EYE, eyeBrightness);
eyeBrightness = i;
delay(50);
}
alive = true;
delay(1000);
}
if(waveCount < 10) {
if(timer % 150 == 0) {
if(armUp) {
armServo.write(80);
} else {
armServo.write(60);
}
waveCount += 1;
armUp = !armUp;
}
} else {
if(waveCount < 20 && timer % (150 + (waveCount - 10) * 50) == 0) {
if(armUp) {
armServo.write(random(60, 80));
} else {
armServo.write(random(80, 100));
}
waveCount += 1;
armUp = !armUp;
timer = 0;
} else if(waveCount >= 20) {
if(timer % 20 == 0)
eyeBrightness = constrain(eyeBrightness - 20, 0, 255);
armServo.write(180);
analogWrite(OUTPUT_LED_EYE, eyeBrightness);
if(eyeBrightness <= 0)
completed = true;
}
if(timer % 20 == 0) {
if(random(1, 10) < 3)
analogWrite(OUTPUT_LED_EYE, 0);
else
analogWrite(OUTPUT_LED_EYE, eyeBrightness);
}
}
timer += DELAY;
}
void execute() {
if(onReleased()) {
animating = true;
}
if(animating) {
animate();
}
}
};
class TouchStage : public Stage {
private:
int prevTouchState = 0;
bool onTouchTimer = false;
int timer = 0;
bool completed = false;
bool calibrated = false;
public:
TouchStage() {
if(digitalRead(INPUT_TOUCH) == 0) {
calibrated = true;
}
}
bool checkComplete() {
return completed;
}
Stage* nextStage() {
return new ButtonStage();
}
void execute() {
int touchInput = digitalRead(INPUT_TOUCH);
if(calibrated && prevTouchState == 0 && touchInput == 1) {
onTouchTimer = true;
digitalWrite(OUTPUT_PUSH, LOW);
}
if(!calibrated && touchInput == 0) {
calibrated = true;
}
if(onTouchTimer) {
timer += DELAY;
}
if(timer >= 5000) {
Serial.println("Moving arm up");
armServo.write(60);
onTouchTimer = false;
completed = true;
}
}
};
TiltStage::TiltStage() {
digitalWrite(OUTPUT_PUSH, LOW);
}
bool TiltStage::checkComplete() {
return digitalRead(INPUT_TILT);
}
Stage* TiltStage::nextStage() {
digitalWrite(OUTPUT_PUSH, HIGH);
return new TouchStage();
}
Stage* currentStage;
void setup()
{
Serial.begin(9600);
currentStage = new TiltStage();
armServo.attach(OUTPUT_SERVO);
pinMode(INPUT_TILT, INPUT);
pinMode(INPUT_COMPLETE, INPUT);
pinMode(INPUT_TOUCH, INPUT);
pinMode(OUTPUT_PUSH, OUTPUT);
pinMode(OUTPUT_SERVO, OUTPUT);
pinMode(OUTPUT_LED_EYE, OUTPUT);
armServo.write(180);
digitalWrite(OUTPUT_PUSH, LOW);
}
void loop()
{
currentStage->execute();
if(currentStage->checkComplete()) {
Stage* newStage = currentStage->nextStage();
delete currentStage;
currentStage = newStage;
}
delay(DELAY);
}
Disassembly
