Recitation 4
Step 1: Build the circuit
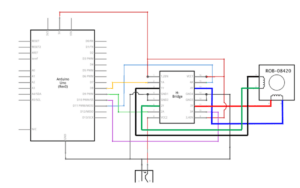
For today’s recitation, we are building a mechanism with a stepper motor, and an H bridge that allows the motor to reverse the spinning motion, without the need of rewiring the cables, which basically makes it bipolar. We are also using a higher voltage, so to protect our laptops, we are using a usb protector. The process went very smoothly, as we followed the schematic above.
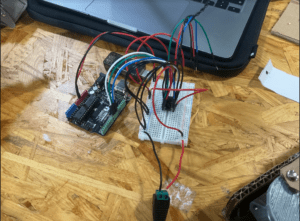
Finished Circuit:
Time lapse Build:
Step 2 & 3: Build a cardboard mechanism!
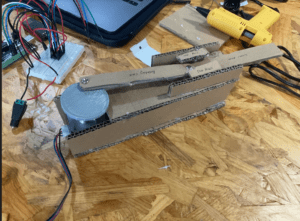
The mechanism for today’s recitation was built using cardboard, and a 3d printed adaptor shaft, along with some rivets to hold the cardboard together. After the mechanism was done, we mounted the stepper motor in between, and sealed off everything. For the personalization part, we drew a fist and cut it out, because we felt that a fist motion could be easily mimicked by the mechanism’s range of motion.
Time lapse build Cutting part:
Time lapse build Mounting:
Finished mechanism
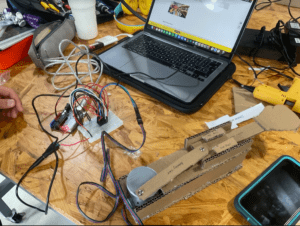
Finished project:
For the coding part, we used the code provided to us in the instructions and tested everything, to make sure it worked. After further code modifications, we decided to change the delay value to 100, and we noticed that the stepper motor spun faster, from side to side. Afterwards, we modified the code. For the last modification, we changed the speed of clockwise rotation to 60 making it faster, and the speed of counterclockwise value to 20, making it slower, therefore giving the fist the effect of punching really fast at first, and winding up to punch again. The code with the highlighted part can be found below.
#include <Stepper.h>
const int stepsPerRevolution = 300; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
myStepper.setSpeed(60);
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(100);
// step one revolution in the other direction:
myStepper.setSpeed(20);
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(100);
Test run with default code:
Delay 100:
Different setSpeed video:
Additional Questions
Question 1: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
“The drumming and Drawing Subhuman”
I think that the main objective of this installation was to make a robot resemble natural human motion. I believe that it can relate to today’s recitation, because after we completed the mechanism, we tried to program it in a way so that it could resemble the natural punching motion of a human.
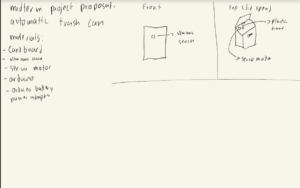
Question 2: What kind of mechanism would you be interested in building for your midterm project? Explain your idea using a sketch (conceptual or technical) with a list of materials that you plan to use. Include details about the ways that you expect the user to embrace in a physical interaction with your project. In particular, explain how would your motor (or motors) with a mechanism will be different than using an animation on a digital screen.
I am considering a trash can that could be activated via a motion sensor. The motion would trigger a reaction, so that a servo motor can spin to a certain direction, and the tab attached to the servo motor would allow the lid of the trash can to open. I am automating an everyday process that most people take for granted, so the user could just wave their hand, and the lid will automatically open, and close after a determined period of time. It will be different because it will be a physical object, which you can expect a physical reaction to happen, unlike a digital mechanism, that will only be happening inside a screen.
Leave a Reply