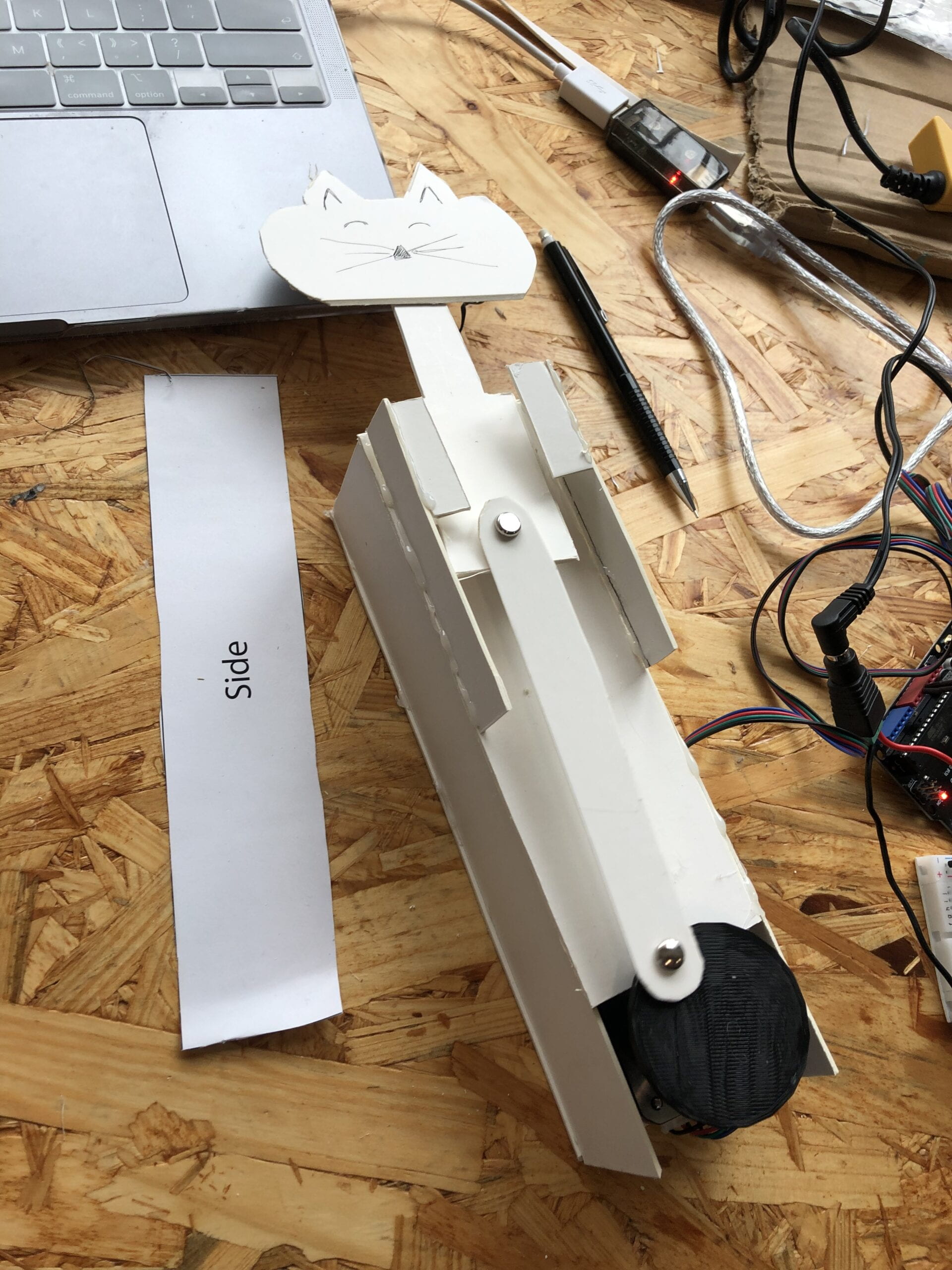
To build this mechanism and circuit, I paired up with Maryam and we choose to use white cardboard that is harder but thinner than the most common cardboard; we did worry that it might not work because it’s thinner, but it turns out working perfectly.

Here’s the code we’re using:
/*
Stepper Motor Control - one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
First, we took turn to build the circuit according to the diagram. Although the wiring is complicated, we managed to set up the IC in the correct direction and finish it smoothly thanks to the help of LAs. We were lucky that our code succeed in the first try and the motor start rotating.
The next part is to build a cardboard mechanism. We glued the template onto the white cardboard and cut each part accordingly. By observeing the sample prototype, we assemblaged our version successfully. After connecting it with the motor, we runned the code and it started moving smoothly.

To further decorate it, we changed the first into a kitten’s head, which fits the white cardboard well. The story we gave it is about a shy kitten that keeps popping its head out of the cave it lives to peek at what is going on in the world.
Question 1: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
The one made by Yoshinobu Nakano and his team intrigues me(Invisible–the shadow chaser), for it’s actually trying to imitate the existence by creating an illusion of the main body without giving a three-dimensional image. It could be understood that it’s based on the concept of presenting the main body through accentuators but only indirectly, whereas our work is giving all the tangible/corporeal materials out here. Therefore, the artist uses actuators that could vibrate to deliver the tactile sense, which is a clever way when one sense is deprived.
Question 2: What kind of mechanism would you be interested in building for your midterm project? Explain your idea using a sketch (conceptual or technical) with a list of materials that you plan to use. Include details about the ways that you expect the user to embrace in physical interaction with your project. In particular, explain how would your motor (or motors) with a mechanism will be different than using animation on a digital screen.
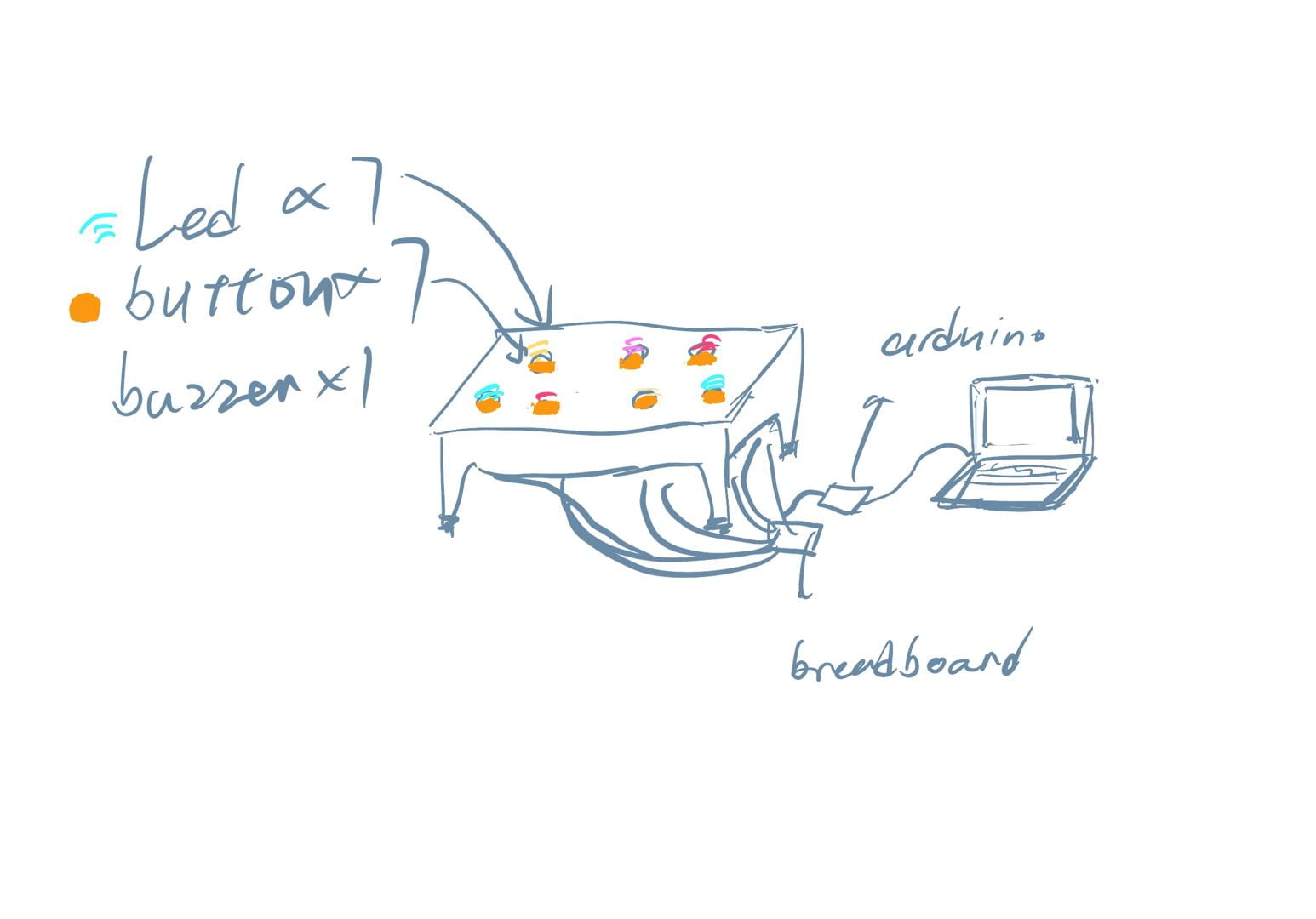
We didn’t include motors in our project. This project is intended as an interactive keyboard; each button is for one musical note. When being played, it will memorize the tune played in one minute, and the led of the according to note will flash in the exact same order to give a visual response to the player.