Midterm project individul report
Individual project proposal
Uniting/unity machine – Dana Zinchenko- Margaret Minsky
We want our project to connect people, it will provide interaction not just between person and the mechanism, but also between individuals. A pair of people need to work together to light up the LED heart: the first they need to rotate two different POTs which are connected to the servo motors or steppers(still deciding). The two halves of one heart are on these motors, so people need to connect them together like a puzzle and then they will win – the LED heart lights up (programming code with If concept).

Recitation 4: Actuators and Mechanisms
Me and my partner were a bit scared when we saw what is waiting us in this recitation. We decided to work as fast as we can and be the most focused on our work. We started pllugging in wires even prior to start of the class. Me and my partner saw that we need to make just one circuit and one mechanism. We decided to divide tasks. I chose to do the circuit and she was making the cardboard part. However, we were helping each other along all the way. There were some new materials and concepts in this work.
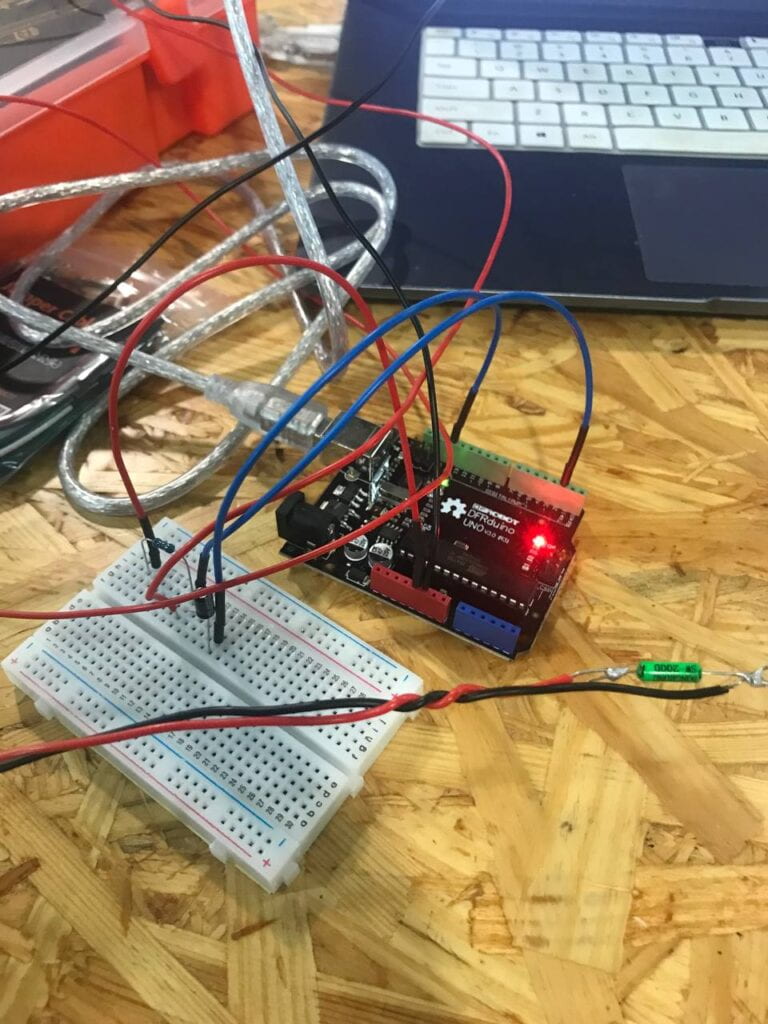
The new important part is that we needed to use usb protectors. The first problem was that I tryed to connect arduino directly to the H-bridge using f/m wires, but I get an advice to connect them using breadboard. It was much more convinient. When I finished my part, we asked professors to check it for not to burn something occasionally. It was working, but the movements were weird. We tryied to understand what was wrong together with the professors. When they were distracted for a minute, I found out that I haven’t yet placed two wires, so I was able to fix it by myself. Also, I grab one of the debugging strategies from the professor for my future projects. I think it will be helpful for me.

After finishing the circuit I started to discuss the ideas for personalization task with my friend. We created many ideas, but we needed to chose the one whose motions are similar to our mechanism – forward and backward.I proposed to make the tongue. We together came up with the idea of making a frog. The important thing is that our stepper worked hard, so it was like running away from the mechanism, hence we added one more cardboard detail to keep it fixed on it’s place. We made eyes and decorated the frog, added some cute parts. We used the same cardboard as for the base of the mechanism, because the texture of frogs and their tongues isn’t flat. I also used my lipstick for decoration.

For the code variation part we changed all 4 of the proposed things: delay(), myStepper.setSpeed(), myStepper.step() , and random().We did the code part together and it was not hard for me, I started to understand this language better.
One of our codes:
*
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include
const int spr = 400; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(spr, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(56);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockewise");
myStepper.step(spr);
delay(random(200-400));
/*
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
*/
}
At the end we got our project: a frog who is trying to catch and eat the fly. It moves her tongue back and forward at a random moments of time. Surprisingly, we finished the first: 20 minutes prior to the end of recitation. We also heard many sweet words about our work from professors and fellows -me and my friend are really proud of our work. We made videos and photos and cleaned our working space at the end. Actually, I had very bad morning, but succeses of this recitation and the whole atmosphere in the studio made my day so much better. I really love recitations and Interaction lab as a whole.
Q1- I want to share some of my thoughts about the ‘Waves’ project by Daniel Palacios Jimenez. I love the idea of it and the visual output is great – it is beautiful and attracting. It is also interacting, because people can play with it. Author uses motors as we used in our recitation. Motors in this project are rotating the ropes and the motor in our recitation was rotating the mechanism which was moving our frog’s tongue. Also, there is a range of different reactions for the viewers’ motions. And our frog is moving her tongue chaotically as the ‘waves’ project produces chaotic patterns. I think that the author chose motors because it is a simple way to make his idea alive, they are also very convinient to work with. He chose elastic rope for making the illusion. It can create the effect of blur and make the project more interesting.
Q2- For my midterm I want to use two motors which are connected to the POTs and LEDs. The person would rotate the POT and it would rotate the small puzzle on the motors. When the puzzle will be solved, the LED in a heart shape will light on. When you are using animation you can’t get the feel of real interaction. When you are experiencing these types of projects you want to be physically connect to the mechanism. For the materials I will also use wires, resistors, Arduino, cardboard with glue.
Group Research Project: Report
1. We started with making the WeChat group together. We found all our group members from other sections, and started proposing ideas in the chat. We picked up the best idea, developed it further, and chose the date of meeting. We all came together to the studio and started making our project. It was very fun! We were trying to use all the materials we saw around. Everyone was into the making, so it was team work. We made and decorated the box, wrote the script, and rehearsed it in the hall. We also picked different roles for everyone and tried to come up with ideas for costumes and makeup.
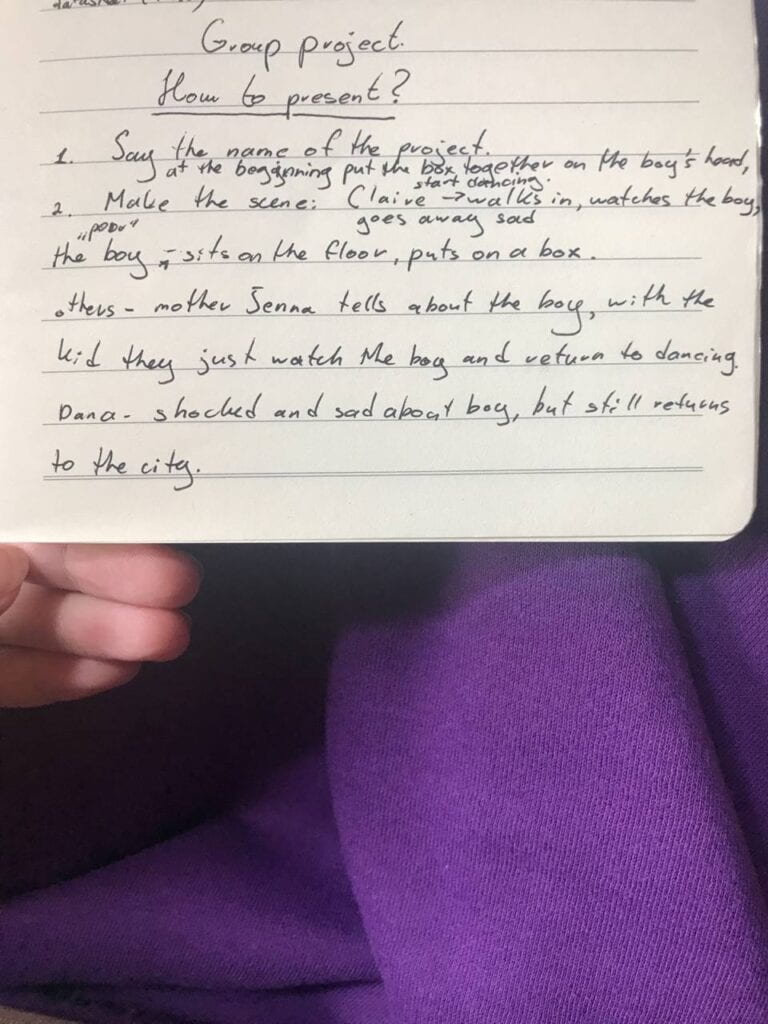
On the second meeting we added flowers and rehearsed the play for the second time. It is not really easy to convey your idea without actually talking about the idea of your invention with the audience. We were adding many lines and ideas during the rehearsals. At the begging the ideas of the box and script were mine, but group contributed very much with the flowers idea and making techniques. This was truly a group project, because everyone worked hard and together.
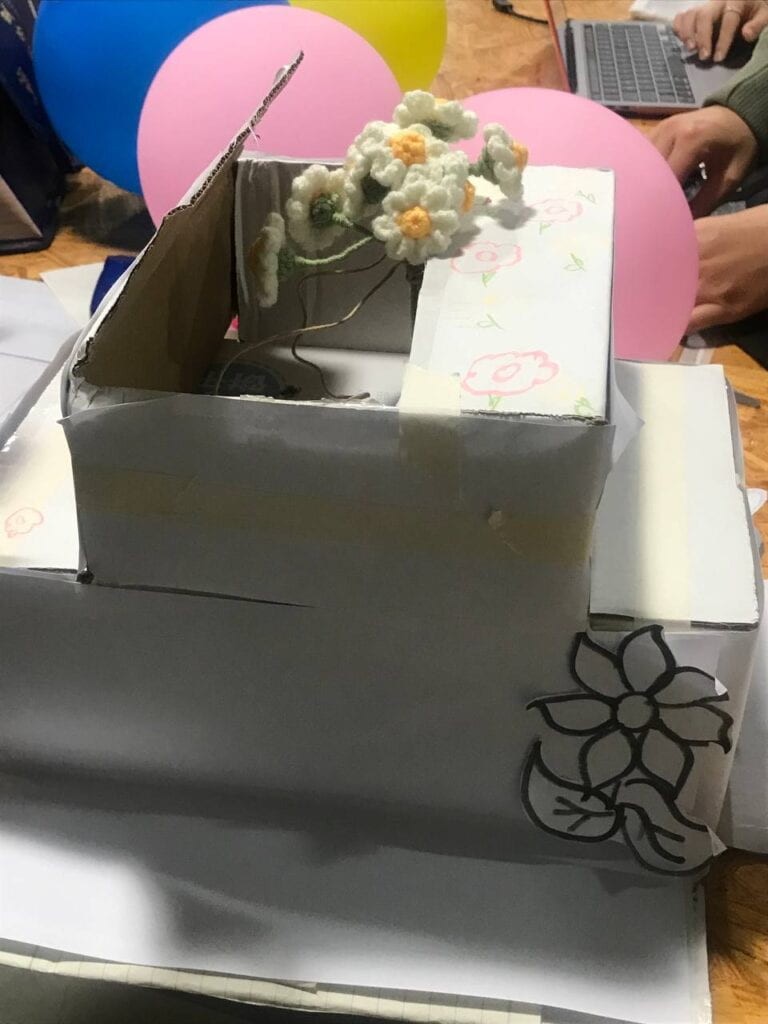
2. The successes of the project is that it gave us the opportunity to learn how to work in a group and to think deeper about the story.The mechanism of pushing flowers worked and no one failed with the lines or improvisation parts of the performance. I think we could be better at decorating the box (to make it more of more quality). Also, I noticed that not everyone got ours idea, so it wasn’t really clear what we were trying to explain with this metaphorical box. We could also add more interactivity to it. But I am 100 percent sure that each of us would be better next time. It was a good lesson for all of us.
3. Our project is the box of pain. It is from ‘The One Who Walked Away From Omelas’. In the story they used the boy as a constant reminder how bad their lives might be. The boy is living in awful room like a prison. People come to see him to make themselves feel the other way. They see the boy who is poor and dirty and hasn’t got any alternative options to live, and they feel happier, because their lives are not so bad. They start appreciate their lives more after thinking of the pity of others. This box is the more humanistic way to remind them how life in the freedom and fresh air is great. It puts you in the black and small space, but the other people can see just how flowers are pushing up. So when someone is struggling in the box, the lives of others becoming better, because they see just flowers. This is a metaphorical box.
It is interactive, because box responses to your movements. Analog input is here- the deeper you put your head into, the higher the flowers will rise.The more someone in this city is struggling, the better lifes of others are becoming. It is also interacting, because it pushes your mind to work, to think, to discuss your ideas with other people – so you are actually interacting with other people after seeing this project. Also, this box doesn’t require you to use electronics to made it. It is great, because it was prohibited for us to use them for this project.
4. I really loved the project of the first group. It was something like helmet or glasses with switches for IQ and EQ levels. First, this is an interesting invention which is consistent with all the group project guidelines. Second, the presentation of the project was amazing. It was well developed and organized, confident and really funny. The creative modifications of the environment were great. Their performance definitely helped me to understand what is their invention and how it works, also they showed us the possible negative consequences of using their device. The design was simple, but it is not bad, because it gives everyone the opportunity to use it without any additional knowledge. My only suggestion for the improvement is to connect artifact to the story clearer. I love this project, but I don’t think that it is actually relevant to the 2 story. It just can be relevant everywhere, so it fits. However, overall presentation and project were great.
Our Box:
Recitation 3: Workout
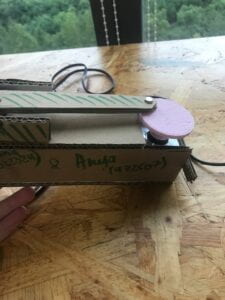
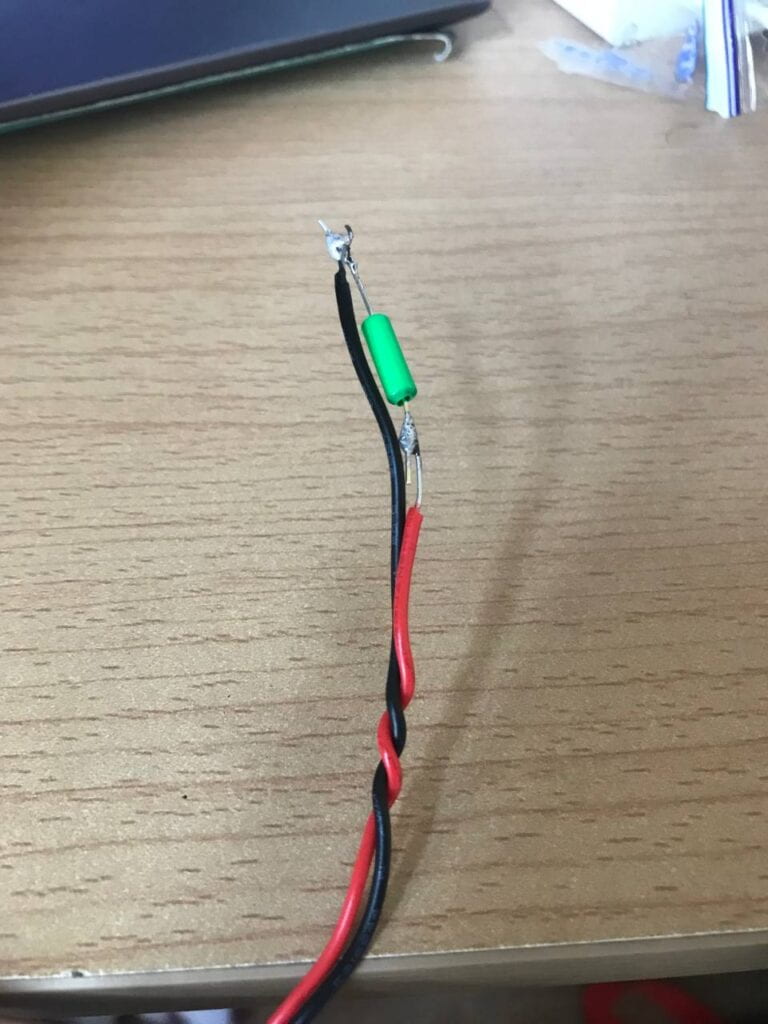
For the first task we needed to prepare our tilt sensors. That was interesting, because I love working with the soldering station. It was questionable is the tilt sensor polarized or not, but we all found out that it is not polarized. In addition, we learned that it is much easier to work when you make cables together (like on the photo), I think it will be extremely helpful to know that you can make any shape you like of these wires.
Second task was harder for me, because I have never ever worked with this type of diagrams. I used some help from the professors. Now I know what D2 means on this diagrams and what it C 22uF. But I also noticed my improvement of building the circuits. I became faster, and now understand more. I was even able to help a little bit people around me to build their circuits.
For the task three of the first step we tried to use our Arduinos. Mine worked immediately, so everything was correct.
In third step me and my recitation partner agreed that it is much easier to just hold the sensor, not to use paper tape. This way it is also easier to do tryouts when working.
Step four was the hardest one. I have not got really much knowledge about Arduino programming language, there were some tasks which we did not study in this course, so my friend helped me a little. I noticed that this language is someway similar to Processing programming language. And I know some basics of it, so it was easier for me to just translate the commands. I understand how the coding is working. But you need to be really careful with punctuation, because one mistake – and your code is broken and you need to debug it. I was able to understand what we need to do, but I didn’t know what is the global variable. Now I know it. Plus, we considered to make the delay bigger for our own comfort and convinience. Device became less sensorable to switching positions, so it was really counting curls when the whole arm is raised.
1st code (we used ‘Great!’ to identify HIGH, and nothing to print LOW, so just the raisings of arm will count) and the second one where we added counting:
int SENSOR_PIN = 2;
int tiltVal;
int prevTiltVal;
int count = 0;
void setup() {
pinMode(SENSOR_PIN, INPUT); // Set sensor pin as an INPUT pin
pinMode(6, OUTPUT);
Serial.begin(9600);
}
void loop() {
// read the state of the sensor
tiltVal = digitalRead(SENSOR_PIN);
if (tiltVal == 1)
{Serial.println("Great!");
}
delay(1000);}
int SENSOR_PIN = 2;
int tiltVal;
int prevTiltVal;
int count = 0;
void setup() {
pinMode(SENSOR_PIN, INPUT); // Set sensor pin as an INPUT pin
pinMode(6, OUTPUT);
Serial.begin(9600);
}
void loop() {
// read the state of the sensor
tiltVal = digitalRead(SENSOR_PIN);
if (tiltVal == 1)
{Serial.println("Great!");
count++;
Serial.println(count);
}
delay(1000);}
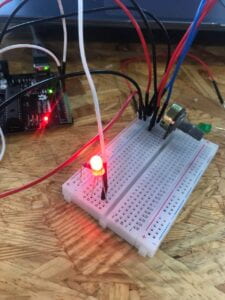
1st code working:
2nd code working:
3rd code: (here you can also see how we added ‘tone’ variable to use the buzzer in the 5th task)
int SENSOR_PIN = 2;
int tiltVal;
int prevTiltVal;
int count = 0;
void setup() {
pinMode(SENSOR_PIN, INPUT); // Set sensor pin as an INPUT pin
pinMode(6, OUTPUT);
Serial.begin(9600);
}
void loop() {
// read the state of the sensor
tiltVal = digitalRead(SENSOR_PIN);
if (tiltVal == 1)
{Serial.println("Great!");
count++;
Serial.println(count);
}
if (count==8) {Serial.println ("Yay, you’ve done one set of curls");
count = 0;
tone(6, 440);
}
delay(1000);
}
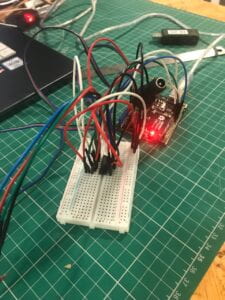
3rd code in action:
The lifehack that I was able to remember is to use ‘count ++’ instead of ‘count = count +1’.
Step five was interesting, but we have very limited time to finish it, so we picked just the first idea. One of the possible ways is to change the workout – you can connect sensor to your leg or other part of body to make it counting. We also added buzzer to make our sensor more interactive.
This sensor can be used in many many ways. I was really exited to see how our own code, circuit, and sensor are working.
Scetch of how possibly people can use this device: