We opted to build a water collection system for Garden No. 2 after reviewing our material tests from the previous week. This system will have a gutter that runs along one side of the building’s roof and is slightly inclined downwards to allow water to flow out and into a collection bucket below. We considered using water bottles as a tube running down the side of the building, but opted against it because PET bottles are already recycled. We also experimented with weaving plastic bags into a net to filter out large waste from the water, but this proved too time consuming and ineffective for smaller debris.
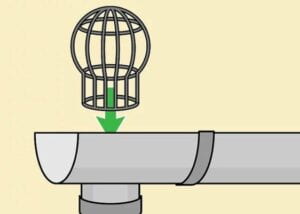
We eventually decided to use fused layers of plastic bags to create sturdy sheets that can be easily shaped. We first used this technique to make a fish pond lining, but we discovered that layering the bags even more gave it more potential for a more useful creation. As a result, we decided to use this material to make U-shaped gutters that would be hung on the side of the roof, as well as to poke holes in it to create a filter for the collection bucket.
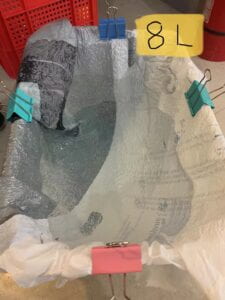
We experimented with various types of bags and discovered that shipping packaging bags were the easiest to fuse and the strongest when layered. We used an iron to fuse the bags into a single large layer and then folded them to make the sheets. The resulting material is waterproof and strong while remaining pliable, allowing us to shape it into a U shape to hold water. It is lightweight, which makes it easy to adhere to the roof, but it is also prone to misshaping due to wind or rain. To counteract this, we’ll need to use sturdier plastic to keep it attached to the building and maintain its shape.



We melted polypropylene bottle caps into a 2cm thick board at 230 degrees Celsius and let it cool overnight in the press to make this sturdier material. We will then use a laser cutter to cut them into hanger shapes that can be screwed into the structure and keep the gutter in place. This is a strong material, but it is more difficult to duplicate than fused plastic. Wire will be used to hold the U shape on the bottom of the gutter, and we’ll need to figure out a secure way to screw the plastic into the building.