Working as a pair with my partner Amelia, I chose to do the cardboard work and Amelia chose to build the circuit, which actually helped us save time. However, we also participated in each other’s part to some extent during the entire working process. I first cut the cardboard and then sticked different parts of them together according to the instructions. However, I found that if I sticked the top rails too close to the linear arm, it is hard for the motor to drive the movements of linear arm. I then made the top rails thinner by using scissors to reduce the resistances. After I combined my part with partner, we chose to add a cute red bird to generate more fun. Below is how our work looks like.
We then change the time of delay by using the function delay() and it worked like this. The angle of the motor moving changed.
Questions:
- I think the project named Feral Robot Dogs created by Natalie Jeremijenko attracted my attention as I went through the entire reading because the outlook of this project is quite interesting with the recycling of cans and other trashes. The idea of making their robot barking when sensing the environment problems is relevant to the actual life that the dogs bark when they smell something bad. I think this work involves interaction between the robot and the environment with connecting sensors and motors together. For the motors used in this project, I think the artist chose motors because it needs motors to drive the movements of feet of dogs.
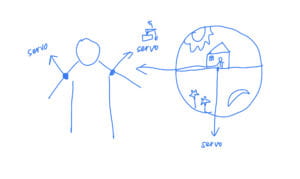
- In my midterm project, I plan to use servos to control the movements of the arms of the person in the house and the background of the house. After the user put their hands on the roofs of the house, the person will change their statements from waking up to sleeping and the music in the house will also change. The sensor in the house will sense the light in the house and thus control the other components. If users push the button on the roof, the LEDs will be turned on and the person will start dancing. I am also considering to add motor to diversify the movements of the person. I think the motors and servos in my project with mechanism is different than using an animation on a digital screen because they actually present in real life although their movements are not that smooth and fantastic. Below is the sketch of how servos work in my midterm project.