FISHING TIME!
— Alyssa and Haotong Wu
Interaction Lab, Professor Margaret
3/19/2023
Tile: Fishing Time!
Team Members: Alyssa, Haotong Wu
Instructor Name: Margerat
Context and Significance: The fishing simulator project was inspired by a device that uses a mechanical pulley structure. We aimed to build a fishing simulator that mimics a real fishing experience and enhances user interaction by allowing them to put on baits, control the auto-motor, and take up and roll out the fish tape. Our project aimed to increase user engagement by introducing a range of difficulty levels that develop users’ patience, and a counting device that adds interactivity. We also aimed to make the project user-friendly, convenient for both left and right-handed users, and easy to use with a magnet instead of a hook.


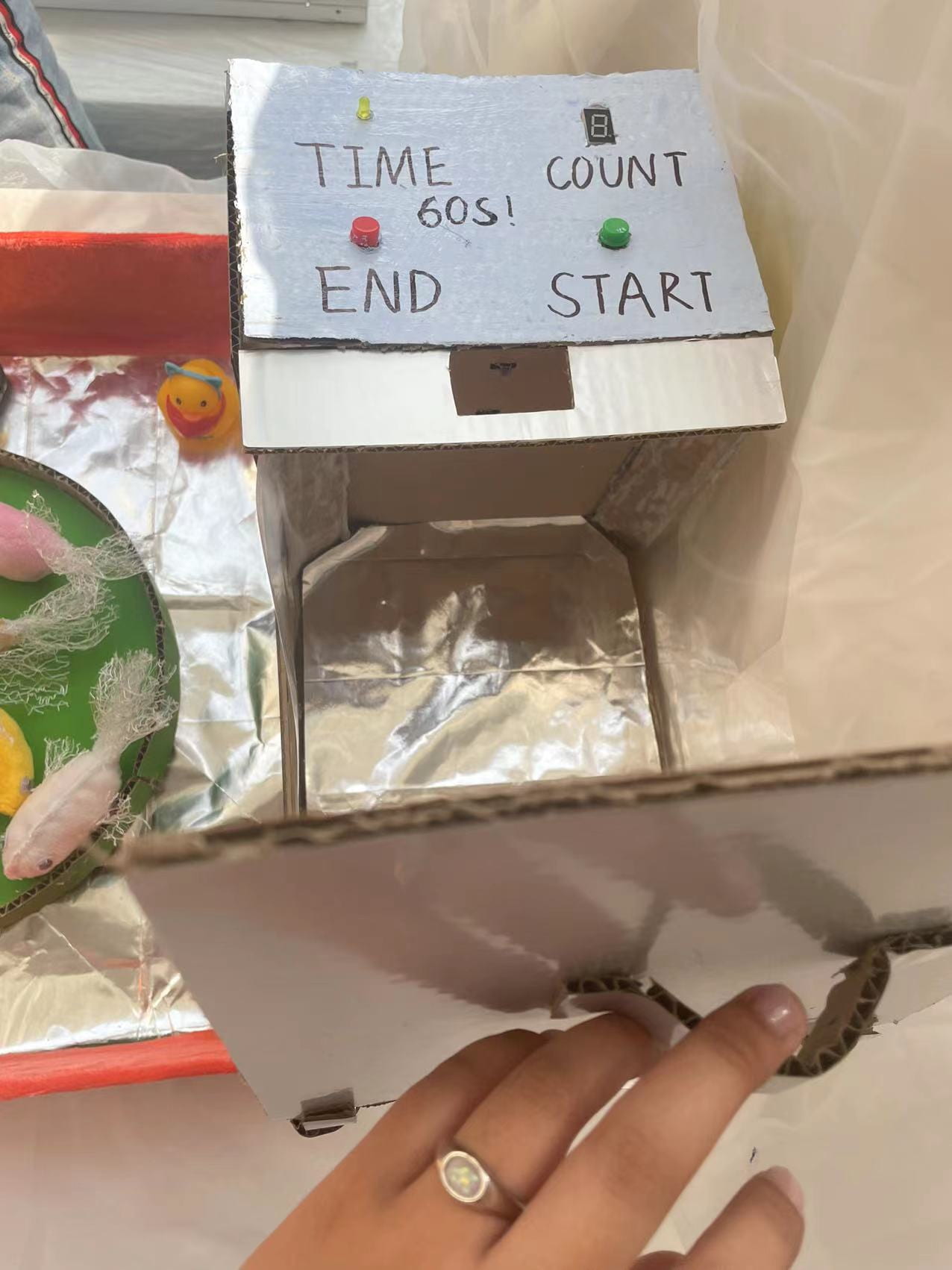
Conception and Design: To achieve our objectives, we divided the project into three components: a fishing rod, a turntable, and a console with a basket. I was responsible for the model design and production, while Haotong was in charge of the circuitry and coding. We used an eight-digit LED to display the fish count, and a buzzer to indicate when the user caught a fish. We also included a button to reset the count. The fishing rod was designed to be held conveniently by both left and right-handed users and attached to the side of the pool to achieve smooth use. We used a magnet instead of a hook, making it easy to hook small fish.
Fabrication and Production:
We faced challenges while building the fishing simulator, especially when connecting the eight-digit LED. However, with help from our professor and research on Arduino, we were able to understand the connection and make it work. We used cardboard to create the structure of the fishing simulator, including the pool, turntable, and console. We used the CNC machine to cut the cardboard pieces into the desired shapes, and glued them together to create the final product. We also programmed the circuitry to control the motor and count the number of fish caught.
Rod prototyping:
We started the prototyping process for the fishing rod by first identifying the materials we would use. Since our goal was to create an affordable and accessible fishing simulator, we decided to use cardboard as our main material. After gathering the necessary materials, we began sketching and cutting out the various parts of the rod, including the handle and the reel seat. We then started assembling the parts, making sure that they were sturdy and aligned properly. We found that the cardboard material was easy to work with and allowed us to iterate quickly on the design. After several rounds of prototyping, we settled on a design that was lightweight, easy to handle, and could accommodate both left and right-handed users.

In the process of designing and prototyping the fishing rod, we encountered an issue regarding its handle. Traditionally, fishing rods are designed to be held with the dominant hand, which is usually the right hand. However, this design poses an inconvenience for left-handed individuals. Therefore, we decided to make our fishing rod user-friendly for both left and right-handed users.

To accomplish this, we modified the design of the handle. We borrowed the method from a YouTube video for making the fishing rod, but we did not fix the fishing line. Instead, we used a straw to build a track for the fishing line. This way, both left-handed and right-handed users can use the fishing rod comfortably. This way, users can hold the fishing rod with their dominant hand and use the other hand to control the fishing line.
youtube video link: https://www.youtube.com/watch?v=YCUM22YYSE4
Overall, the design and fabrication process of the fishing rod allowed us to create a user-friendly and functional product that can be used by both left and right-handed individuals.
turntable prototyping:
Moving on to the spinning plate, we designed a round cardboard covered with green paper to simulate the look of a lotus leaf. The plate was placed in the center of the pool, and stuffed cloth fish were placed on top of it. The plate was rotated by a servo motor, which we programmed to change direction when its position was over or equal to 180 degrees. We wanted to incorporate a button to control the playing level, but during the coding process, we discovered that we could change the speed of the spinning plate every time the fish count increased. As a result, we were able to achieve the process of leveling up without needing a separate button.

Stuffed cloth fish prototyping:
To create the stuffed cloth fish, we used a sewing machine to sew the fabric into fish shapes, leaving a small opening to fill them with stuffing. We chose a variety of colors and patterns to make the fish visually appealing. The magnets used for the fishing hooks were also sewn into the mouth area of each fish. This allowed the magnets to be concealed while still effectively catching the fish.
Magnet testing:

Overall, the cardboard prototyping process allowed us to quickly and easily test and modify our design. The stuffed cloth fish were a fun and creative way to add an interactive element to the game. The use of the servo motor and magnets for the fishing hooks added a level of sophistication and complexity to the game, making it engaging for all levels of players.
Programming process:
Firstly, Haotong tried to use the light sensor to count the number of fish. To increase the interaction and to make users easy to understand, we decided to use the eight-digit LED, which can show the number on it. But this component is really hard to use and connect. Initially, Haotong simplified the circuit and only used one LED and a buzzer to achieve the counting function. After asking the professor for help, and searching the knowledge in the Arduino, we know that an eight-dight LED can be understood as eight common LEDs. So we reconnected the circuit, and it worked well.
Upgrade version with eight-dight LED:
First simple version:
And then, Haotong added the servo motor, which can change the direction when the position is over or equal to 180. Firstly, we want to use a button to control the playing level, but when Haotong was writing the code, she found a good way to change the speed; every time count+1, the speed will also add, so this can achieve the process of leveling up. During user testing, we found that the light sensor was very unstable and there was a bug that the counter would keep counting as long as the fish was not moved. The light sensor will record the resistance value of the current environment at each start-up and then have a fixed amount of change, and whenever the initial value plus the amount of change is exceeded, then it will count. But the amount of change selected is also very unstable, and the degree of stability is also related to the color of the small fish. We laid a layer of reflective paper under the basket, so that not only can increase the environmental brightness, but also can increase the decorative nature. What’s more, Haotong increased the delay for each count and added a flag2 to determine if the fish was removed. She debugged the best time interval based on testing so that she wouldn’t have to put in a fish and count it multiple times.
And during user testing, it was suggested that a timing feature could be added. So Haotong added the mills function to the code. But it counts every time from the beginning of the program. She found inspiration from the light sensor to add a variation based on the change of flag to determine whether the time reaches the specified value.
Conclusions:
The fishing simulator project was a challenging and exciting experience for both of us. We learned a lot about circuitry and coding, and how to use different components to achieve our objectives. We also learned how to work collaboratively and divide tasks efficiently. Our project achieved its objectives of mimicking a real fishing experience and enhancing user interaction. The project’s unique features, including the magnet instead of a hook and the eight-digit LED, made it more user-friendly and engaging.
Our project was a success in terms of creating a functional and engaging fishing game device. Throughout the prototyping process, we encountered several challenges and had to pivot our designs to make the project work. Our cardboard prototyping was a critical part of the process, allowing us to quickly and cost-effectively test out different designs for the fishing rod, spinning plate, and fish trap. It also helped us identify potential issues early on, such as the need to make the fishing rod usable for both left and right-handed individuals.
Overall, we are pleased with the final product and believe it has the potential to spark interest in fishing among a broader audience. If we had more time, we would have liked to explore additional features for the fishing rod, such as the ability to attach one’s own bait. We also acknowledge the need to provide clearer instructions for users to avoid putting the fishing rod directly into the hole instead of removing the fish by hand.
Throughout the project, we learned the importance of collaboration and leveraging each other’s strengths. As partners, we were able to balance design, production, and coding tasks, and provide feedback and support along the way. Ultimately, we are proud of the final result and believe it demonstrates the power of prototyping to quickly iterate and refine ideas.
Annex: For the project, we used the following components:
- Arduino Uno R3 board
- Step motor
- Eight-digit LED
- Buzzer
- Button
- Light sensor
- Round magnets
- Cardboard
- Glue
- Cloth
Here are videos about our device in three different situations:
- Failed to catch eight fishes in 60s, when time is up, yellow led lights up, buzzer makes “beeeeeep” noise.
2. Successfully catch eight fish within 60s. A short clip of ,music will play through the buzzer.
3. Just want to tryout the device, quit half way.
Making and testing process:
Details of the device:




We also included the circuit diagram and the code used for programming the fishing simulator.
The following code is done by Haotong with help from professors:
#include
#include "pitches.h"
Servo myservo; //
int y = 0; //resistor of light sensor
int y_n = 0; // the delta of light sensor
int count = 0;
int bottom = 0; //reset button
int levelBottom = 0; //stop button
int pos = 0;
int speed = 5;
int flag = 0;// to determine whether the device is running or not
int flag2 = 0;//prevent the counting function from running when one round doesn't finish
int music[] = { NOTE_C4, NOTE_B3, NOTE_E2, NOTE_E2, NOTE_E2, NOTE_E2, NOTE_D2, NOTE_G2, NOTE_E2 };
int noteDurations[] = { 4, 4, 4, 4, 4, 4, 4, 4, 4 };
unsigned long startTime;
unsigned long endTime;
void setup() {
// put your setup code here, to run once:
pinMode(12, OUTPUT);
pinMode(8, OUTPUT); //8是右亮
pinMode(9, OUTPUT); //9右下亮
pinMode(10, OUTPUT); //10 上
pinMode(11, OUTPUT); //11中间
pinMode(13, OUTPUT); //13左下
pinMode(7, OUTPUT); //7下
pinMode(6, OUTPUT); //6右上
pinMode(3, OUTPUT); //time
Serial.begin(9600);
myservo.attach(5);
}
void loop() {
// put your main code here, to run repeatedly:
if (flag == 1){
endTime = millis();
}
if (y_n == 0) {
y_n = analogRead(A0);
y_n = y_n + 120;
}
bottom = analogRead(A1);
levelBottom = analogRead(A2);
if (millis()- startTime >= 60000 && flag == 1 ) {
digitalWrite(3, HIGH);
tone(12, 500);
delay(2300);
noTone(12);
digitalWrite(3, LOW);
flag = 0;
startTime = millis();
//
}
if ((bottom > 1000) && (flag == 0)) {
flag = 1; //maybe can remove
startTime = millis();
y_n = 0;
}
if (levelBottom > 1000) {
flag = 0;
count = 0;
y_n = 0;
}
pos = pos + speed;
if (pos >= 180) {
pos = 180;
speed = speed * -1;
} else if (pos <= 0) { pos = 0; speed = speed * -1; } if (flag == 1) { // Serial.print("Servo: "); // Serial.println(pos); myservo.write(pos); } //myservo.write(pos); // tell servo to go to position in variable 'pos' if (bottom > 1000) {
count = 0;
flag = 1;
speed = 5;
}
y = analogRead(A0);
//Serial.println(y);
Serial.println(bottom);
if ((((y > y_n)&& (flag == 1)))&&(flag2 == 0)) {
//digitalWrite(8,High);
flag2 = 1;
if (count == 1) {
tone(12, 300);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(1000);
//digitalWrite(8, HIGH);
//digitalWrite(9, HIGH);
noTone(12);
delay(800);
}
if (count == 2) {
tone(12, 400);
digitalWrite(8, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(13, LOW);
digitalWrite(7, LOW);
delay(1000);
//digitalWrite(8, HIGH);
//digitalWrite(10, HIGH);
//digitalWrite(11, HIGH);
//digitalWrite(13, HIGH);
//digitalWrite(7, HIGH);
noTone(12);
delay(800);
}
if (count == 3) {
tone(12, 500);
digitalWrite(8, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(9, LOW);
digitalWrite(7, LOW);
delay(1000);
//digitalWrite(8, HIGH);
//digitalWrite(10, HIGH);
//digitalWrite(11, HIGH);
//digitalWrite(9, HIGH);
//digitalWrite(7, HIGH);
noTone(12);
delay(800);
}
if (count == 4) {
tone(12, 600);
digitalWrite(6, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(11, LOW);
delay(1000);
//digitalWrite(6, HIGH);
//digitalWrite(8, HIGH);
//digitalWrite(9, HIGH);
//digitalWrite(11, HIGH);
noTone(12);
delay(800);
}
if (count == 5) {
tone(12, 700);
digitalWrite(6, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(9, LOW);
digitalWrite(7, LOW);
delay(1000);
//digitalWrite(6, HIGH);
//digitalWrite(10, HIGH);
//digitalWrite(11, HIGH);
//digitalWrite(9, HIGH);
//digitalWrite(7, HIGH);
noTone(12);
delay(800);
}
if (count == 6) {
tone(12, 800);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(11, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(13, LOW);
delay(1000);
//digitalWrite(6, HIGH);
//digitalWrite(10, HIGH);
//digitalWrite(11, HIGH);
//digitalWrite(9, HIGH);
//digitalWrite(7, HIGH);
//digitalWrite(13, HIGH);
noTone(12);
delay(800);
}
if (count == 7) {
tone(12, 900);
digitalWrite(10, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
delay(1000);
//digitalWrite(10, HIGH);
//digitalWrite(8, HIGH);
//digitalWrite(9, HIGH);
noTone(12);
delay(800);
}
if (count == 8) {
tone(12, 1000);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(13, LOW);
delay(1000);
noTone(12);
for (int thisNote = 0; thisNote < 9; thisNote++) { tone(12, music[thisNote], noteDurations); delay(400); noTone(12); flag = 0; } } count = count + 1; if ((speed >= 0) && (count > 1)) {
speed = speed + 2;
} else {
speed = speed - 2;
}
if (count == 10) {
count = 0;
flag = 0;
speed = 5;
}
} else {
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(11, HIGH);
digitalWrite(13, HIGH);
delay(100);
flag2 = 0;
}
//delay(10000);
}