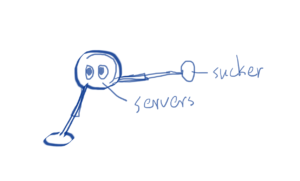
I intended to build a robot that can climb on tilted surface. It should contain three main parts: the feet(suckers), the legs(server) and the head(arduino). The feet should be able to attach onto tilted surface and the legs should be able to move the feet and control direction. I’m currently working on the feet, trying to enable the robot to stay firmly on tilted surface.
Originally I planned to use commercial suckers which are commonly used to hang clothes and mirrors because they are capable of holding heavy weight. However with experiment I found that it is imposible for small set of mechanics to produce enough power to press down the sucker or to easily release it. So I changed the strategy and tried to find on Taobao a small vaccum generator and suckers that fit its size. Most of the suckers I found are used in industrial productions, on the robotic arms, connected with a giant air pump and do something like this:
But instead I want it to do something like this:
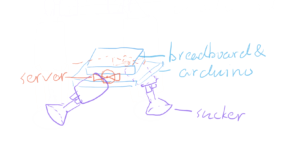
I brought two small vacuum generators, two connectors, pipes and two 30mm suckers and put them together. Together they can hold the weight of the breadboard and themselves, but hardly anything more:
This project really helped me learned a lot about ideal vs. reality:
At first I thought it would look like this:
Turns out it would have to look more like this:
And here are some more reflections:
- I used the sucker with sponge in order for it to suck onto walls. However because of the sponge the suckers do not attach immediately and need the help of a slight push. A way to improve is to try with smooth sucker on smooth surface.
- The radius of the suckers is too small and it produces very limited power to attach to the wall. By finding new ways to connect the sucker with the vacuum generator I can experiment with sucker with larger radius which would provide stronger adherence. In theory by using a 60mm radius sucker the adherent power should be 4 times it have now, which would enable it to carry more weight.
- It makes a lot of difference when the scale of components are different. For this robot to be realized, if the sucker’s ability were to stay limited, than it would be critical to lessen the weight of the arduino, the breadboard, the servers and the battery. It is near impossible to be realized on the scale that I have it now, when all other components are quite so big but the suckers are small.
- The ultimate blocker is the power supply. For the vacuum generator I’m using now, it needs 12 volts input. It is quite impossible for one sucker to be able to carry two vacuum generators plus the 12 volts battery plus all other parts. But it is already the smallest vaccum generator I could find in the market.
- If I use divided tubes that allow one vacuum generator to simultaneously work on two suckers, it might provide a stronger adherence.
- It is important to do more research beforehand and experiment before setting on to a project idea. A lot of things are technically possible but very hard to realize. That’s why significance in the usage matters in a design.
I ordered two more types of suckers, respectively with and without the sponge. They are the biggest industrial suckers I could find on Taobao, but not especially big—twice the radius of the suckers I got now and should provide four times the force. I will see if they can carry the weight of an Arduino and decide if I should go further with this project.