We built a drawing machine for this week’s recitation.
First, I connected the circuit according to this schematic:
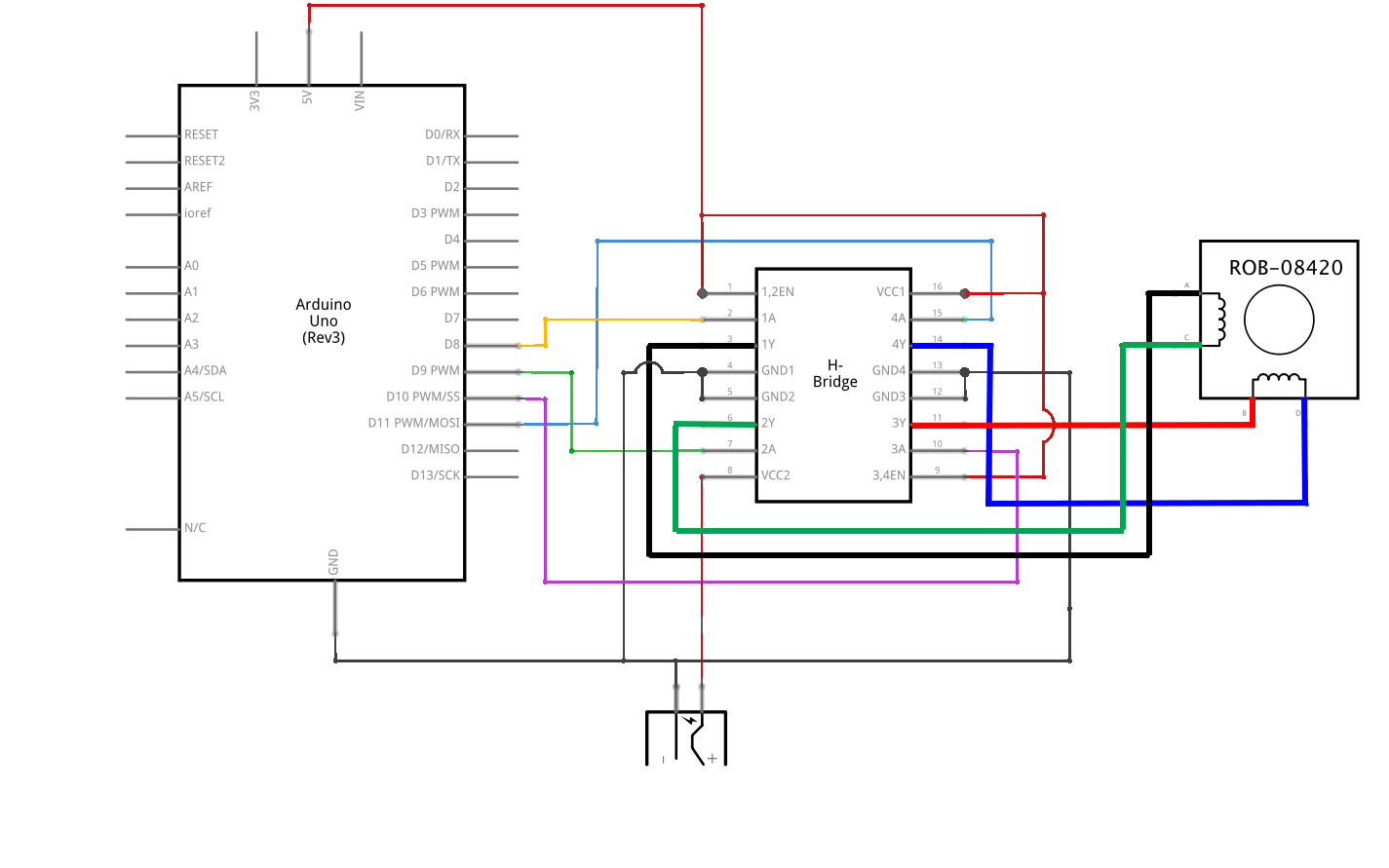
With the code from Arduino>File>Examples>Stepper>stepper_oneRevolution, I made it revolve one round then back:
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println(“clockwise”);
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println(“counterclockwise”);
myStepper.step(-stepsPerRevolution);
delay(500);
}
It works:
Then I attached a potentiometer and edited the example code Arduino>File>Examples>Stepper>MotorKnob to control the motor.
This is the code:
/*
* MotorKnob
*
* A stepper motor follows the turns of a potentiometer
* (or other sensor) on analog input 0.
*
* http://www.arduino.cc/en/Reference/Stepper
* This example code is in the public domain.
*/
#include <Stepper.h>
// change this to the number of steps on your motor
#define STEPS 200
// create an instance of the stepper class, specifying
// the number of steps of the motor and the pins it’s
// attached to
Stepper stepper(STEPS, 8, 9, 10, 11);
// the previous reading from the analog input
int previous = 0;
void setup() {
// set the speed of the motor to 30 RPMs
stepper.setSpeed(30);
}
void loop() {
// get the sensor value
int val = analogRead(0);
val = map(val,0,1023,0,200);
//val = val/8.2;
// move a number of steps equal to the change in the
// sensor reading
stepper.step(val – previous);
// remember the previous value of the sensor
previous = val;
}
The tricky part is to map the potentiometer input with the stepper output.
With the combination of another drawing arm, it looked like this:
There we have our drawing machine:)
A flaw is that sometimes the stepper do not operate on our command but on its own “will”. I think it might be because it wasn’t connected firmly to ground.
Q & A
Question 1: What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
I would like to make a robot that could walk on different surface:
The choice of actuators was determined by the style of movements desired. For most robots the locomotive style are quite monotonous and thus restrict their action to one single surface. I want to challenge that idea.
The actuators the drawing machine uses is very simple, but by adding the number of the stepper it is able to perform a more complex task. And because the medium of machine instead of hands which the artists have perfect control, the work it produces has a sense of randomness and therefore differs from those artworks completely done by humans.
I think the creative process relies strongly on observation and inspiration. With observation we know the capacity of each kind of actuators, and with inspiration we combine them into performing the function that we intend. The two are the major components of every successful creative design.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
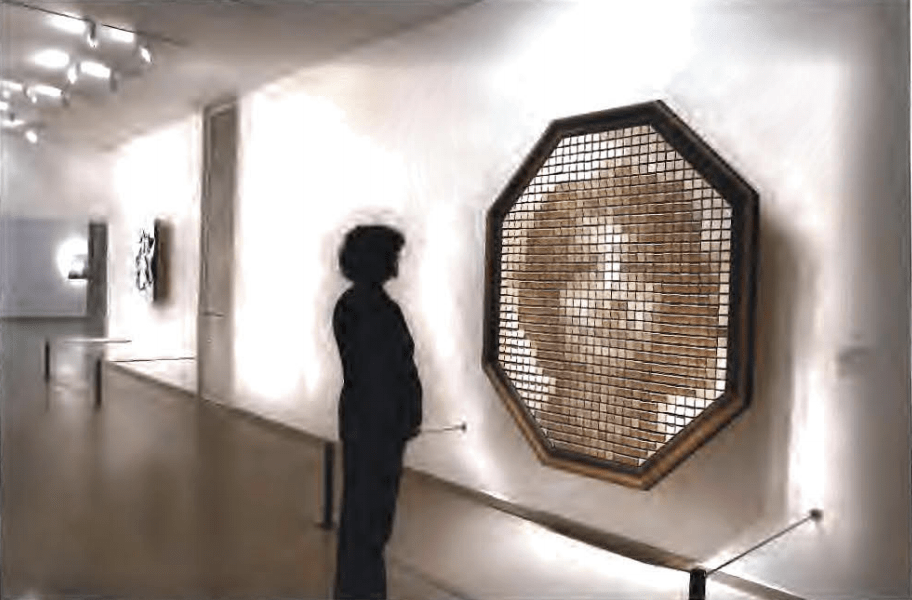
I think it is very interesting to see one’s reflection in woods. The project challenges the audience perception of common materials, for a normal wood is incapable of changing according to the interactions, the natural stableness being one of its essential qualities. I also love how the rendering of wooden pixels transform the ordinary image into a warm, high-end art piece. The project is similar to the drawing machine in ways of creating visual art, but the means is completely different. One is linear while the other is pixelated. One involves the force of randomness while the other mimic established forms. I cannot know for sure the actuators used in this project as I’m not entirely sure if the wooden pixels are being moved around or simply flipped over. Either cases, still, I would need to know more about actuators to tell its design.