ISMR 2021 Workshop on Intelligent Human Augmentation in Medical Robotic Systems [NOV 2021]
LIST OF Confirmed SPEAKERS:
- Jaydev P. Desai, Georgia Institute of Technology, US
- Jeremy Brown, Johns Hopkins University, US
- Damiano Zanotto, Stevens Institute of Technology, US.
- Aaron Young, Georgia Institute of Technology, US
- Mojtaba Sharifi, SanJose State University, US
- Nicholas Fey, The University of Texas at Austin
- Delsys Inc., MA, USA
- Mahdi Tavakoli, University of Alberta, Canada
- S. Farokh Atashzar, New York University, US
[PROGRESS Workshop at ICIP 2021] – PROmotinG DiveRsity in Signal ProcESSing
Join us in the second year of PROGRESS, which is an initiative of the IEEE Signal Processing Society designed to motivate, provide information, and support women and underrepresented minorities in pursuing academic careers in Signal Processing. 2021 ICIP PROGRESS Workshop (Virtual). 19-20 September 2021. Application Submission Deadline: 10 May 2021. Link: https://ieeeprogress.org/
[Sept 24, 2021]: CUSP Talk Series
Title: Safe and Resilient Autonomous Driving in Smart Cities

Golnaz Habibi is currently a research scientist at the Department of Aeronautics and Astronautics at MIT. She will join the department of computer science at the University of Oklahoma as an assistant professor in 2022. Previously, she was a robotics engineer at Autel robotics leading the team of motion planning of autonomous drones. Golnaz’s work lies at the intersection of robotics, control, machine learning, and multi-agent systems. Her current research focuses on visual autonomous navigation, reliable communication and improving the safety and reliability of autonomous agents.
Abstract: Despite all recent advances in robotics and automation, building a resilient, safe, and practical autonomous system with the ability to interact with the environment efficiently and overcoming the challenges of real-world driving scenarios is not trivial. This talk addresses three critical challenges in building a fully autonomous driving system including safety and robustness, transferability, and scalability which are the key components of driving in urban areas. This talk starts with overviewing the safety analysis of the autonomous system in the presence of environmental uncertainty and adversarial behaviors. Then, the challenges of self-driving vehicles navigating in highly dynamic environments will be addressed. In particular, a transferable and scalable algorithm is introduced which incorporates the environment context for predicting the motion behaviors of pedestrians in environments with high uncertainty. The presented framework is also able to continually learn when the data is available incrementally, leading to a real-time learning and inference model. This model is then extended to a multi-agent learning framework including a fleet of autonomous vehicles (AV) or smart nodes (IX). The last part of the talk demonstrates an example of an end-to-end distributed and scalable search and rescue team of robots for saving injuries in disastrous events. The talk will be concluded by introducing ongoing and future directions on the safety and robustness of autonomous navigation systems.
IEEE International Conference on Autonomous System -IEEE ICAS 2021.
![]()
Special Track on Autonomous Medical Robotic Systems, as part of ICAS2021: Deadline for the Special Track: April 25th. Details: https://lnkd.in/dgGDQSU
[Aug 23, 2021]: MERIIT Talk Series
Title: Neuromechanics: Insects to In-vivo Mechatronics

Prof. Ravi Vaidyanathan, Reader in Bio-Mechatronics
Imperial College London, London, UK
http://www.biomechatronicslab.co.uk/
Abstract: Mechatronics is the synergistic combination of precision engineering, electronic control, and systems thinking in the design of products and manufacturing processes. Bio-Mechatronics may be viewed as its extension fused with influence from biological systems; i.e. mechatronic systems designed based on inspiration from neural and physiological systems. The talk will review methodologies for the enhancement of engineering (robotic) design based upon biological studies, with emphasis on systems thinking in walking robots and human augmentation (cybernetics). The core hypothesis is the idea that complex behavior emerges from the interaction of an entity with its environment as a result of sensory-motor activity; interactions among a breadth of subsystems must be tuned and adapted to achieve this objective. Architectures founded upon biological inspiration will be summarized with specific examples in medical and mobile robotic systems including insect-inspired mobile robots, robot exoskeletons, brain-implant therapies and human-robot interface systems.
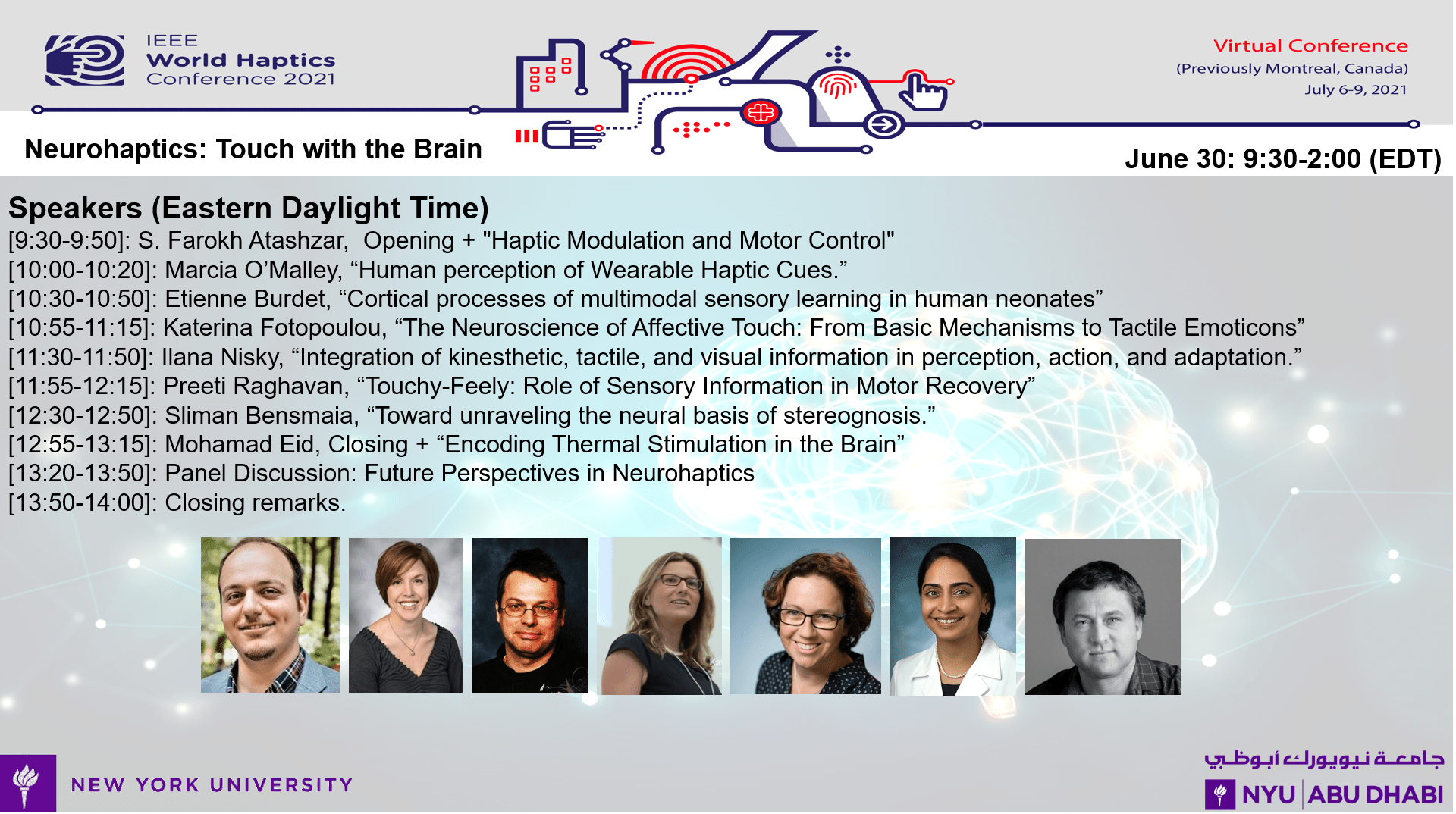
World Haptics 2021 Workshop on NeuroHaptics: Touch with the Brain
Video: https://youtu.be/D9B_4XvQbeY?t=1601
[PROGRESS Workshop at ICASSP 2021] – PROmotinG DiveRsity in Signal ProcESSing
Join us in the second year of PROGRESS, which is an initiative of the IEEE Signal Processing Society designed to motivate, provide information, and support women and underrepresented minorities in pursuing academic careers in Signal Processing. 2021 PROGRESS Workshop (Virtual). 4-5 June 2021. Application Submission Deadline: 10 May 2021. Link: https://ieeeprogress.org/
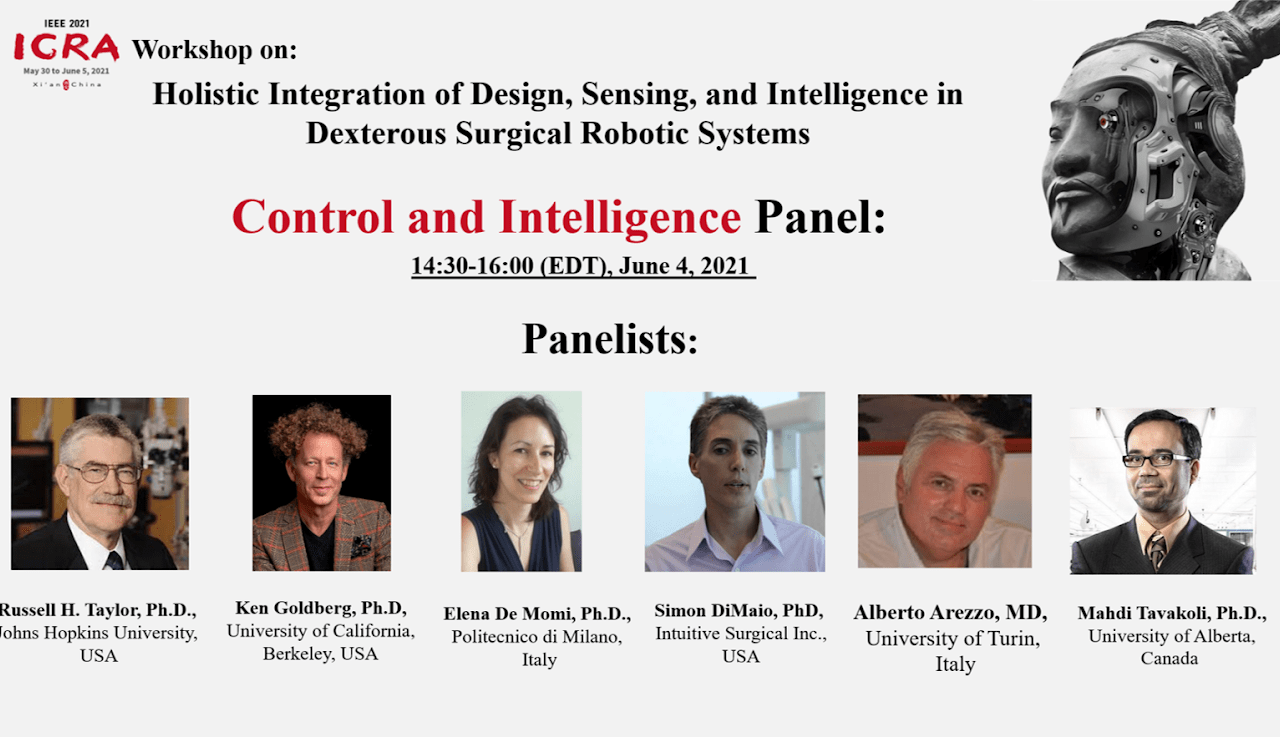
ICRA 2021 Workshop on ” Holistic Integration of Design, Sensing, and Intelligence in Dextrous Surgical Robotic Systems” – Workshop Details: https://sites.google.com/view/icra2021workshop
ICRA 2021 Workshop on “Impact of COVID-19 on Medical Robotics and Wearables Research” – Workshop Details: Website: https://lnkd.in/dhmKBTX
Recorded Video: https://youtu.be/d-r4Mjb_tO0?t=87


[April 09, 2021]: CUSP Research Seminar
Title: Intelligent Human-Robot Fusion: The Horizon of Assistive Robotics @ MERIIT Lab
 Prof. S. Farokh Atashzar,
Prof. S. Farokh Atashzar,
Assistant Professor,
Electrical & Computer Engineering
Mechanical & Aerospace Engineering
New York University
Talk Brochure: Human-Robot Fusion @ MERIIT Lab
Abstract: — Society aging has raised significant concerns regarding the balance between available resources and the needs of citizens for urban life of tomorrow. Robotic systems have been seen as a technological bridge that can deliver a wide range of medical services to patients relaxing the burden on the healthcare system and democratizing the accessibility to the needed services under the umbrella of telemedicine. The need has been pronounced during the COVID-19 pandemic when almost all healthcare capacities were booked for fighting against the virus. Interactive robotic technologies have already revolutionized the field of neurorehabilitation and have been successful in accelerating neural recovery and motor restoration for patients living with neural damages (such as those caused by stroke, which is the leading cause of motor disabilities) through promoting brain plasticity. In addition to the above, neurorobotics (such as exoskeletons and prosthetic systems), interfaced with the human neural system, have been successfully utilized in the past decade to augment the motor capabilities of individuals living with the lack of mobility or a biological limb. Although such systems have shown a great potential for delivering rehabilitation and assistance, there still exist several challenges and needs to make the technology (a) more accessible in remote areas to facilitate equal opportunity for a wider range of patients, regardless of geographical and demographic barriers under the telemedicine umbrella, (b) more intelligent in delivering assistance, (c) more adaptable to the biomechanical signatures of the users, (d) and more robust in decoding neural responses. This has led to active research in the fields of neurorobotics, AI, and biosignal processing. Motivated by the notes above, this talk aims to report on recent developments from the MERIIT lab at NYU, covering multiple topics related to human-robot integration in the context of (tele)robotic rehabilitation and smart bionics
[August 12, 2020]
Title: Robotic NeuroRehabilitation and Human-Machine Interface [Organized by Quanser Inc.]
Prof. S. Farokh Atashzar,
Assistant Professor,
New York University
Talk Brochure: Link
Recorded Video:
[December 09, 2020]
Title: Learning Strong Inference Models in Small Data Domains: Towards Robust Human Pose Estimation
 Prof. Ostadabbas,
Prof. Ostadabbas,
Assistant Professor,
Electrical & Computer Engineering Department
Northeastern University
ostadabbas@ece.neu.edu
http://www.northeastern.edu/ostadabbas/
Talk Brochure: Sarah Ostadabbas – MERIIT lab Talk Series
Join us at https://nyu.zoom.us/j/98661083228
Abstract: — Recent efforts in machine learning (especially with the new waves of deep learning introduced in the last decade) have obliterated records for regression and classification tasks that have previously seen only incremental accuracy improvements. There are many other fields that would significantly benefit from machine learning (ML)-based inferences where data collection or labeling is expensive, such as healthcare. In these domains (i.e., Small Data domains), the challenge we now face is how to learn efficiently with the same performance with fewer data. Many applications will benefit from a strong inference framework with deep structure that will: (i) work with limited labeled training samples; (ii) integrate explicit (structural or data-driven) domain knowledge into the inference model as editable priors to constrain search space; and (iii) maximize the generalization of learning across domains. In this talk, I explore a generalized ML approach to solve the small data problem in the context of human pose estimation with several medical applications. There are two basic approaches to reduce data needs during model training: (1) decrease inference model learning complexity via data-efficient machine learning, and (2) incorporate domain knowledge in the learning pipeline through the use of data-driven or simulation-based generative models. In this talk, I present my recent work on merging the benefits of these two approaches to enable the training of robust and accurate (i.e., strong) inference models that can be applied on real-world problems dealing with data limitation. My plan to achieve this aim is structured in four research thrusts: (i) introduction of physics- and/or data-driven computational models here referred to as weak generator to synthesize enough labeled data in an adjacent domain; (ii) design and analysis of unsupervised domain adaptation techniques to close the gap between the domain adjacent and domain-specific data distributions; (iii) combined use of the weak generator, a weak inference model and an adversarial framework to refine the domain adjacent dataset by employing a set of unlabeled domain-specific dataset; and (iv) development and analysis of co-labeling/active learning techniques to select the most informative datasets to refine and adapt the weak inference model into a strong inference model in the target application.
NYU-Quanser: Robotics Research Workshop
Monday, November 25, 2019 [9:30 AM – 5:30 PM]
Registration: https://pages.quanser.com/NYU-Workshop-Registration.html
Keynote Speakers
 |
 |
 |
| DAGMAR STERNAD, PROFESSOR, NORTHEASTERN UNIVERSITY | JOHN-ROSS RIZZO, ASSISTANT PROFESSOR, NYU LANGONE AND RUSK REHAB INSTITUTE |
Herve Lacheray, Senior Project Manager, Quanser |
NYU SOE Speakers
Speakers
- Ludovic Righetti
- Maurizio Porfiri
- Farshad Khorrami
- Zhong-Ping Jiang
- Vikram Kapila
- Giuseppe Loianno
- Chen Feng
- Joo H. Kim
Abstract:
Advanced robotic technologies, smart wearable systems, and artificial intelligence have reformed our society and the way that various services are delivered to people in need. An example is surgical robotic technology, which allowed for achieving accuracies beyond the natural competence of humans. In addition, with the use of intelligent neurorehabilitation robotic technologies, augmented with virtual reality environments, post-stroke patients are now able to receive systematics interactive therapies that accelerate neural plasticity and motor recovery.
Using smart assistive technologies connected and controlled by the central nervous systems of humans, it is now possible to augment independence and enhance the quality of lives of individuals with sensorimotor deficits and help them with living a normal life. There are several other examples of advanced intelligent technologies, including drones, exoskeletons, mobile legged robots, smart control systems, which have been shaping the future of our cities and the lives of humans and the definition of our modern world. In this workshop scientists at NYU, in collaboration with Quanser Inc, present state-of-the-art research and recent activities in the field.
Past Events:
- Workshop on “INTELLIGENT HUMAN AUGMENTATION IN MEDICAL ROBOTIC SYSTEMS” at ISMR2020, USA.
- NYU-Quanser Robotics Day: https://pages.quanser.com/NYU-Workshop-Registration.html
- 2020 IEEE International Conference on Autonomous Systems (ICAS2020), Montreal, Canada.
- 2020 International Symposium on Medical Robotics (ISMR2020), Georgia Institute of Technology, US.
- Symposium on “Advanced Bio-Signal Processing and Machine Learning for Assistive and Neuro-Rehabilitation Systems” at the 2019 IEEE Global Conference on Signal and Information Processing (GlobalSIP2019), Canada.
- Special session on “Shared Autonomy for Motor Augmentation in Medical Robotic Systems” at the 2019 IEEE International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada.
- Workshop on “Autonomy and Intelligence in Robotic Rehabilitation and Assistive Technologies“, at RehabWeek2019, Canada.
- Workshop on “Sensorimotor Augmentation in NeuroRehabilitation Robotic and Prosthetic Technologies” at ISMR2019, USA.
- Symposium on “Advanced Bio-Signal Processing and Machine Learning for Medical Cyber-Physical Systems” at the 2018 IEEE Global Conference on Signal and Information Processing (GlobalSIP2018), USA.
- Symposium on “Advanced Bio-Signal Processing for Rehabilitation and Assistive Systems” at the 2017 IEEE Global Conference on Signal and Information Processing (GlobalSIP2017), USA.
- Workshop on “Physical Human-robot and Human-telerobot Interaction: From Theory to Application for Neuro-rehabilitation,” 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), Vancouver, BC, Canada.
- Workshop on ”Advanced Intelligent Mechatronics for Neuromuscular Rehabilitation and Recovery Assessment,” 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM 2016), Banff, AB, Canada